ES Is More Than Just a Traditional Finite-Difference Approximator
Joel Lehman, Jay Chen, Jeff Clune, and Kenneth O. Stanley
Uber AI Labs, San Francisco, CA
{joel.lehman, jayc, jeffclune, kstanley}@uber.com
### ABSTRACT
An evolution strategy (ES) variant based on a simplification of a natural evolution strategy recently attracted attention because it performs surprisingly well in challenging deep reinforcement learning domains. It searches for neural network parameters by generating perturbations to the current set of parameters, checking their performance, and moving in the aggregate direction of higher reward. Because it resembles a traditional finite-difference approximation of the reward gradient, it can naturally be confused with one. However, this ES optimizes for a different gradient than just reward: It optimizes for the average reward of the entire population, thereby seeking parameters that are robust to perturbation. This difference can channel ES into distinct areas of the search space relative to gradient descent, and also consequently to networks with distinct properties. This unique robustness-seeking property, and its consequences for optimization, are demonstrated in several domains. They include humanoid locomotion, where networks from policy gradient-based reinforcement learning are significantly less robust to parameter perturbation than ES-based policies solving the same task. While the implications of such robustness and robustness-seeking remain open to further study, this work’s main contribution is to highlight such differences and their potential importance.
ACM Reference Format:
Joel Lehman, Jay Chen, Jeff Clune, and Kenneth O. Stanley. 2018. ES Is More Than Just a Traditional Finite-Difference Approximator. In GECCO ’18: Genetic and Evolutionary Computation Conference, July 15–19, 2018, Kyoto, Japan. ACM, New York, NY, USA, 9 pages. https://doi.org/10.1145/3205455.3205474
1 INTRODUCTION
Salimans et al. [21]Salimans and colleagues recently demonstrated that an approach they call an evolution strategy (ES) can compete on modern reinforcement learning (RL) benchmarks that require large-scale deep learning architectures. While ES is a research area with a rich history [23] encompassing a broad variety of search algorithms (see Beyer and Schwefel [2]), Salimans et al. [21]Salimans and colleagues has drawn attention to the particular form of ES applied in that paper (which does not reflect the field as a whole), in effect a simplified version of natural ES (NES; [31]). Because this form of ES is the focus of this paper, herein it is referred to simply as ES. One way to view ES is as a policy gradient algorithm applied to the parameter space instead of to the state space as is more typical in RL [33], and the distribution of parameters (rather than actions) is optimized to maximize the expectation of performance. Central to this interpretation is how ES estimates (and follows) the gradient of increasing performance with respect to the current distribution of parameters. In particular, in ES many independent parameter vectors are drawn from the current distribution, their performance is evaluated, and this information is then aggregated to estimate a gradient of distributional improvement.
The implementation of this approach bears similarity to a finite-differences (FD) gradient estimator [20, 25], wherein evaluations of tiny parameter perturbations are aggregated into an estimate of the performance gradient. As a result, from a non-evolutionary perspective it may be attractive to interpret the results of Salimans et al. [21]Salimans and colleagues solely through the lens of FD (e.g. as in Ebrahimi et al. [8]), concluding that the method is interesting or effective only because it is approximating the gradient of performance with respect to the parameters. However, such a hypothesis ignores that ES’s objective function is interestingly different from traditional FD, which this paper argues grants it additional properties of interest. In particular, ES optimizes the performance of any draw from the learned distribution of parameters (called the search distribution), while FD optimizes the performance of one particular setting of the domain parameters. The main contribution of this paper is to support the hypothesis that this subtle distinction may in fact be important to understanding the behavior of ES (and future NES-like approaches), by conducting experiments that highlight how ES is driven to more robust areas of the search space than either FD or a more traditional evolutionary approach. The push towards robustness carries potential implications for RL and other applications of deep learning that could be missed without highlighting it specifically.
Note that this paper aims to clarify a subtle but interesting possible misconception, not to debate what exactly qualifies as a FD approximator. The framing here is that a traditional finite-difference gradient approximator makes tiny perturbations of domain parameters to estimate the gradient of improvement for the current point in the search space. While ES also stochastically follows a gradient (i.e. the search gradient of how to improve expected performance across the search distribution representing a cloud in the parameter space), it does not do so through common FD methods. In any case, the most important distinction is that ES optimizes the expected
value of a distribution of parameters with fixed variance, while traditional finite differences optimizes a singular parameter vector.
To highlight systematic empirical differences between ES and FD, this paper first uses simple two-dimensional fitness landscapes. These results are then validated in the Humanoid Locomotion RL benchmark domain, showing that ES’s drive towards robustness manifests also in complex domains: Indeed, parameter vectors resulting from ES are much more robust than those of similar performance discovered by a genetic algorithm (GA) or by a non-evolutionary policy gradient approach (TRPO) popular in deep RL. These results have implications for researchers in evolutionary computation (EC; [6]) who have long been interested in properties like robustness [15, 28, 32] and evolvability [10, 14, 29], and also for deep learning researchers seeking to more fully understand ES and how it relates to gradient-based methods.
2 BACKGROUND
This section reviews FD, the concept of search gradients (used by ES), and the general topic of robustness in EC.
2.1 Finite Differences
A standard numerical approach for estimating a function’s gradient is the finite-difference method. In FD, tiny (but finite) perturbations are applied to the parameters of a system outputting a scalar. Evaluating the effect of such perturbations enables approximating the derivative with respect to the parameters. Such a method is useful for optimization when the system is not differentiable, e.g. in RL, when reward comes from a partially-observable or analytically-intractable environment. Indeed, because of its simplicity there are many policy gradient methods motivated by FD [9, 25].
One common finite-difference estimator of the derivative of function ff with respect to the scalar xx is given by:
f′(x)≈ϵf(x+ϵ)−f(x),
f prime of x is approximately f of x plus epsilon minus f of x, all divided by epsilon
given some small constant ϵepsilon. This estimator generalizes naturally to vectors of parameters, where the partial derivative with respect to each vector element can be similarly calculated; however, naive FD scales poorly to large parameter vectors, as it perturbs each parameter individually, making its application infeasible for large problems (like optimizing deep neural networks). However, FD-based methods such as simultaneous perturbation stochastic approximation (SPSA; Spall 25) can aggregate information from independent perturbations of all parameters simultaneously to estimate the gradient more efficiently. Indeed, SPSA is similar in implementation to ES.
However, the theory for FD methods relies on tiny perturbations; the larger such perturbations become, the less meaningfully FD approximates the underlying gradient, which formally is the slope of the function with respect to its parameters at a particular point. In other words, as perturbations become larger, FD becomes qualitatively disconnected from the principles motivating its construction; its estimate becomes increasingly influenced by the curvature of the reward function, and its interpretation becomes unclear. This consideration is important because ES is not motivated by tiny perturbations nor by approximating the gradient of performance for any singular setting of parameters, as described in the next section.
2.2 Search Gradients
Instead of searching directly for one high-performing parameter vector, as is typical in gradient descent and FD methods, a distinct approach is to optimize the search distribution of domain parameters to achieve high average reward when a particular parameter vector is sampled from the distribution [1, 24, 31]. Doing so requires following search gradients[1, 31], i.e. gradients of increasing expected fitness with respect to distributional parameters (e.g. the mean and variance of a Gaussian distribution).
While the procedure for following such search gradients uses mechanisms similar to a FD gradient approximation (i.e. it involves aggregating fitness information from samples of domain parameters in a local neighborhood), importantly the underlying objective function from which it derives is different:
J(θ)=Eθf(z)=∫f(z)π(z∣θ)dz,(1)
J of theta is defined as the expected value under theta of f of z, which is the integral of f of z times pi of z given theta, d z
where f(z)f of z is the fitness function, and zz is a sample from the search distribution π(z∣θ)pi of z given theta specified by parameters θtheta. Equation 1 formalizes the idea that ES’s objective (like other search-gradient methods) is to optimize the distributional parameters such that the expected fitness of domain parameters drawn from that search distribution is maximized. In contrast, the objective function for more traditional gradient descent approaches is to find the optimal domain parameters directly: J(θ)=f(θ)J of theta equals f of theta.
While NES allows for adjusting both the mean and variance of a search distribution, in the ES of Salimans et al. (2017)Salimans and colleagues[21], the evolved distributional parameters control only the mean of a Gaussian distribution and not its variance. As a result, ES cannot reduce variance of potentially-sensitive parameters; importantly, the implication is that ES will be driven towards robust areas of the search space. For example, imagine two paths through the search space of similarly increasing reward, where one path requires precise settings of domain parameters (i.e. only a low-variance search distribution could capture such precision) while the other does not. In this scenario, ES with a sufficiently-high variance setting will only be able to follow the latter path, in which performance is generally robust to parameter perturbations. The experiments in this paper illuminate circumstances in which this robustness property of ES impacts search. Note that the relationship of low-variance ES (which bears stronger similarity to finite differences) to stochastic gradient descent (SGD) is explored in more depth in Zhang et al. (2017)Zhang and colleagues[34].
2.3 Robustness in Evolutionary Computation
Researchers in EC have long been concerned with robustness in the face of mutation [15, 28, 32], i.e. the idea that randomly mutating a genotype will not devastate its functionality. In particular, evolved genotypes in EC often lack the apparent robustness of natural organisms [13], which can hinder progress in an evolutionary algorithm (EA). In other words, robustness is important for its link to evolvability[10, 29], or the ability of evolution to generate productive heritable variation.
As a result, EC researchers have introduced mechanisms useful to encouraging robustness, such as self-adaptation [16], wherein evolution can modify or control aspects of generating variation. Notably, however, such mechanisms can emphasize robustness over evolvability depending on selection pressure [4, 13], i.e. robustness
can be trivially maximized when a genotype encodes that it should be subjected only to trivial perturbations. ES avoids this potential pathology because the variance of its distribution is fixed, although in a full implementation of NES variance is subject to optimization and the robustness-evolvability trade-off would likely re-emerge.
While the experiments in this paper show that ES is drawn to robust areas of the search space as a direct consequence of its objective (i.e. to maximize expected fitness across its search distribution)that is, to maximize expected fitness across its search distribution, in more traditional EAs healthy robustness is often a second-order effect [11, 13, 32]. For example, if an EA lacks elitism and mutation rates are high, evolution favors more robust optima although it is not a direct objective of search [32]; similarly, when selection pressure rewards phenotypic or behavioral divergence, self-adaptation can serve to balance robustness and evolvability [13].
Importantly, the relationship between ES’s robustness drive and evolvability is nuanced and likely domain-dependent. For example, some domains may indeed require certain NN weights to be precisely specified, and evolvability may be hindered by prohibiting such specificity. Thus an interesting open question is whether ES’s mechanism for generating robustness can be enhanced to better seek evolvability in a domain-independent way, and additionally, whether its mechanism can be abstracted such that its direct search for robustness can also benefit more traditional EAs.
3 EXPERIMENTS
This section empirically investigates how the ES of Salimans et al. [21]Salimans and colleagues systematically differs from more traditional gradient-following approaches. First, through a series of toy landscapes, a FD approximator of domain parameter improvement is contrasted with ES’s approximator of distributional parameter improvement. Then, to ground such findings, the robustness property of ES is further investigated in a popular RL benchmark, i.e. the Humanoid Locomotion task [3]. Policies from ES are compared with those from a genetic algorithm (GA) and a representative high-performing policy gradient algorithm (TRPO; [22])TRPO, to explore whether ES is drawn to qualitatively different areas of the parameter space.
3.1 Fitness Landscapes
This section introduces a series of illustrative fitness landscapes (shown in figure 1) wherein the behavior of ES and FD can easily be contrasted. In each landscape, performance is a deterministic function of two variables. For ES, the distribution over variables is an isotropic Gaussian with fixed variance as in Salimans et al. [21]Salimans and colleagues; i.e. ES optimizes two distributional parameters that encode the location of the distribution’s mean. In contrast, while the FD gradient-follower also optimizes two parameters, these represent a single instantiation of domain parameters, and consequently its function thus depends only on f(θ)f of theta at that singular position. The FD algorithm applies a central difference gradient estimate for each parameter independently. Note that unless otherwise specified, the update rule for the gradient-follower is vanilla gradient descent (i.e. it has a fixed learning rate and no momentum term); one later fitness landscape experiment will explore whether qualitative differences between ES and FD can be bridged through combining finite differences with more sophisticated optimization heuristics (i.e. by adding momentum).
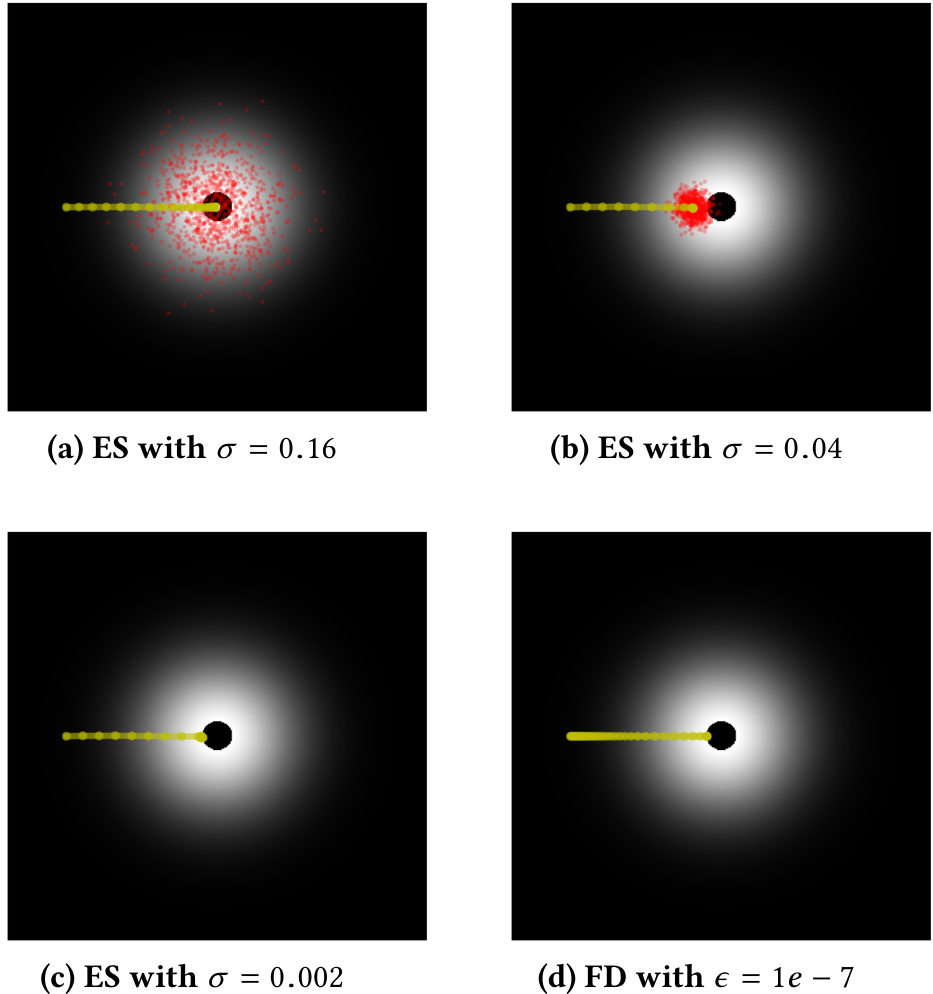
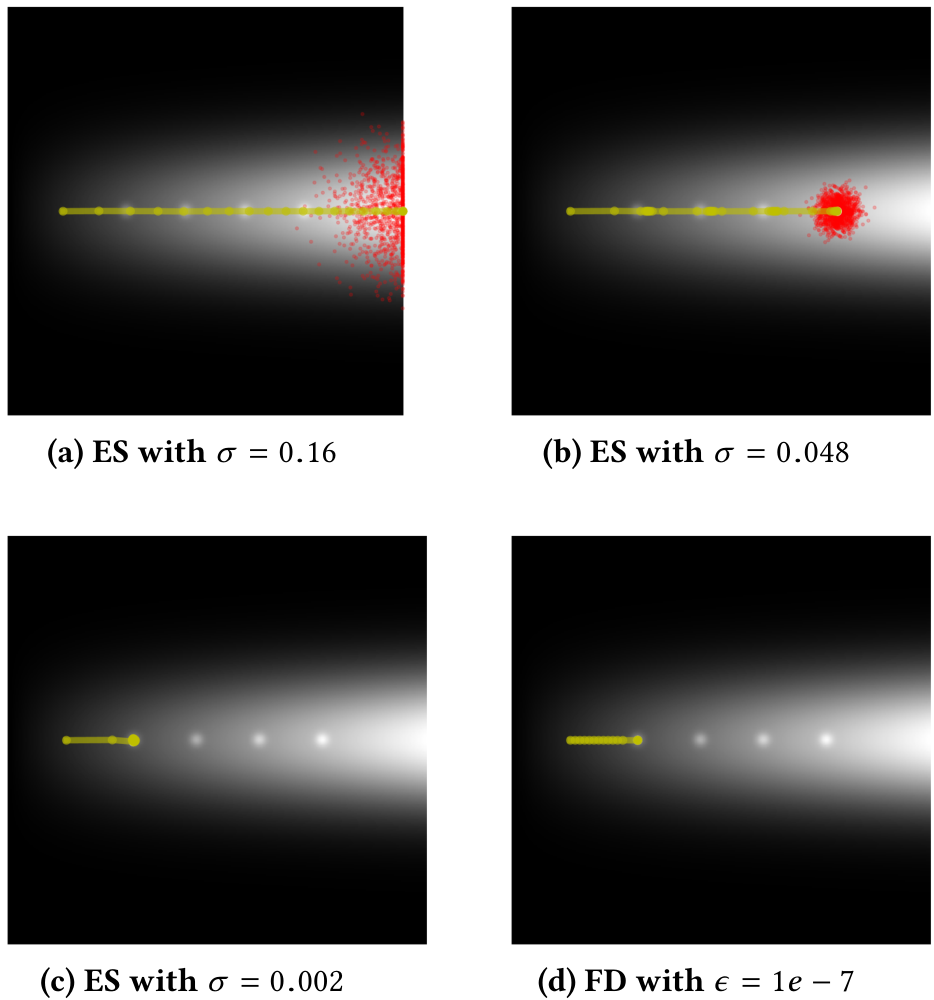
In the Donut landscape (figure 1a), when the variance of ES’s Gaussian is high enough (i.e. σ of the search distribution is set to 0.16, shown in figure 2a)where sigma is zero point one six, ES maximizes distributional reward by centering the mean of its domain parameter distribution at the middle of the donut where fitness is lowest; figure 3a further illuminates this divergence. When ES’s variance is smaller 1(σ=0.04)sigma equals zero point zero four, ES instead positions itself such that the tail of its distribution avoids the donut hole (figure 2b). Finally, when ES’s variance becomes tiny (σ=0.002)sigma equals zero point zero zero two, the distribution becomes tightly distributed along the edge of the donut-hole (figure 2c). This final ES behavior is qualitatively similar to following a FD approximation of the domain parameter performance gradient (figure 2d).
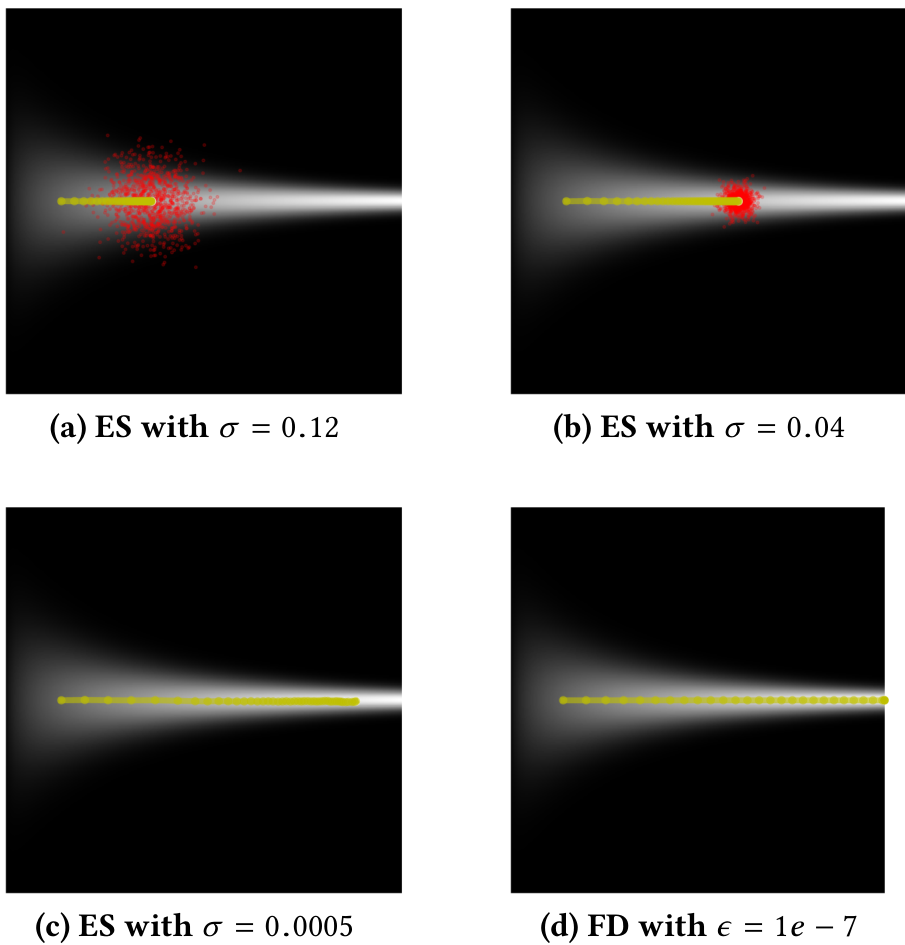
In the Narrowing Path landscape (figure 1b), when ES is applied with high variance (σ=0.12)sigma equals zero point one two it is unable to progress far along the narrowing path to higher fitness (figure 4a), because expected value is highest when a significant portion of the distribution remains on the path. As variance declines (figures 4b and 4c), ES proceeds further along the path. FD gradient descent is able to easily traverse the entire path (figure 4d).
In the Fleeting Peaks landscape (figure 1c), when high-variance ES is applied (σ=0.16)sigma equals zero point one six the search distribution has sufficient spread to ignore the local optima and proceeds to the maximal-fitness area (figure 5a). With medium variance (σ=0.048; figure 5b), ES gravitates to each local optima before leaping to the next one, ultimately becoming stuck on the last local optimum (see figure 3b). With low variance (σ=0.002; figure 5c), ES latches onto the first local optimum and remains stuck there indefinitely; FD gradient descent becomes similarly stuck (figure 5d).
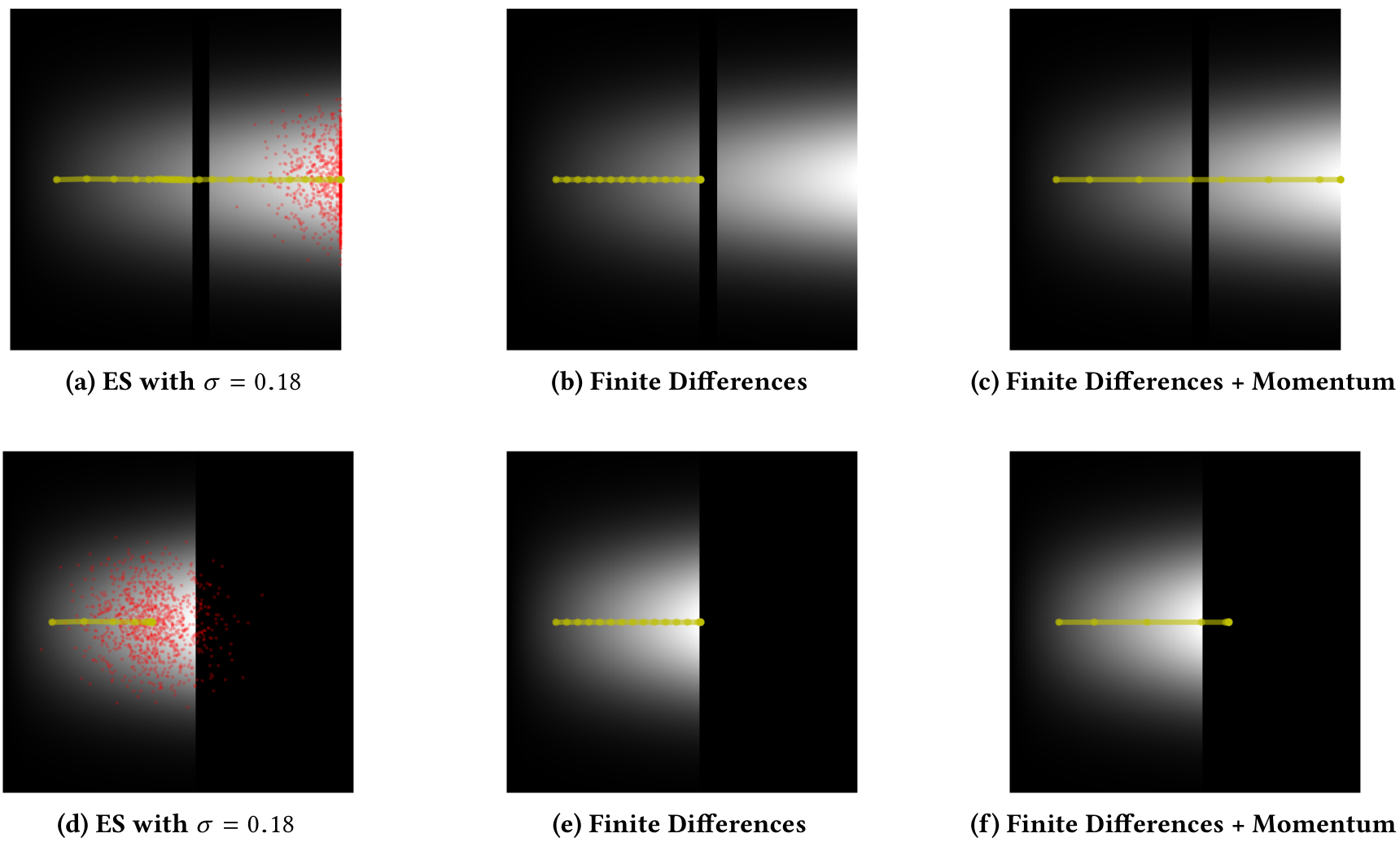
Finally, in the Gradient Gap landscape (figure 1d), ES with high variance (σ=0.18)sigma equals zero point one eight can traverse a zero-fitness non-differentiable gap in the landscape (figure 6a), demonstrating ES’s ability to “look ahead” in parameter space to cross fitness valleys between local optima (see also figure 3c). Lower variance ES (not shown) and FD cannot cross the gap (figure 6b). Highlighting that ES is informed by samples at the tail of the search distribution and is not blindly pushing forward, ES with high variance in the Gradient Cliff landscape (figure 6d) does not leap into the cliff, and lower variance ES (not shown) and finite differences (figure 6e) behave no different than they do in the Gradient Gap landscape.
To explore whether more sophisticated update rules could enable FD to behave more similarly to high-variance ES, FD with momentum was additionally applied in both the Gradient Gap and Gradient Cliff landscapes. Momentum is a heuristic often combined with SGD, motivated by the insight that local optima in rugged landscapes can sometimes be avoided by accumulating momentum along previously beneficial directions. The question in this experiment is whether such momentum might help FD to cross the zero-fitness area of the Gradient Gap landscape. Indeed, FD with sufficient momentum (⪆0.8)greater than approximately zero point eight can cross the Gradient Gap (figure 6c); however such momentum drives FD in the Gradient Cliff (figure 6f) further into the zero-fitness area, highlighting that heuristics like momentum (while useful) do not enable conditional gap-crossing as in high-variance ES, which is informed not by a heuristic, but by empirical evidence of what lies across the gap. Note that a GA’s population would also be able to conditionally cross such gaps.
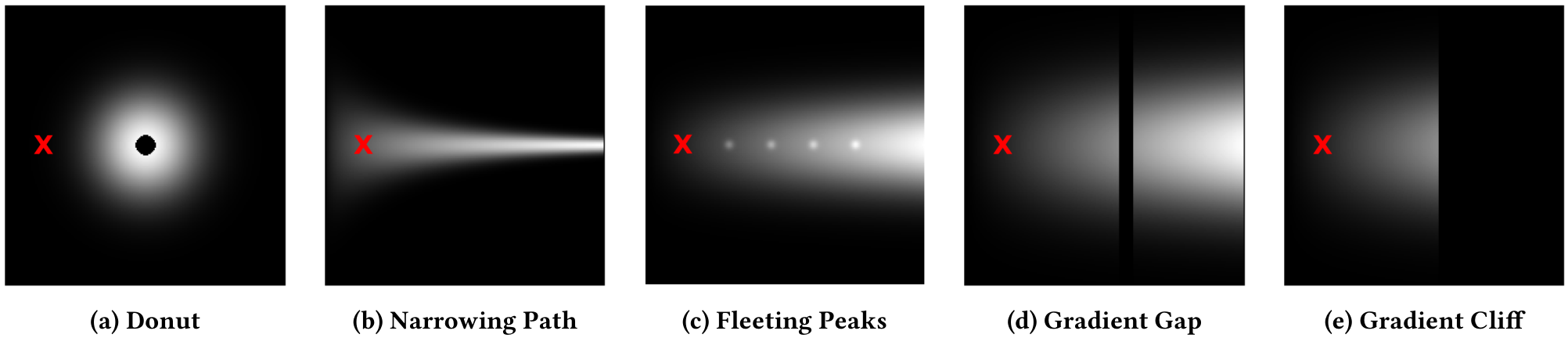
Figure 1: Illustrative fitness landscapes. A series of five fitness landscapes highlight divergences between the behavior of ES and FD. In all landscapes, darker colors indicate lower fitness and the red X indicates the starting point of search. In the (a) Donut landscape, a Gaussian function assigns fitness to each point, but the small neighborhood immediately around and including the Gaussian’s peak is flattened to a reward of zero. In the (b) Narrowing Path landscape, fitness increases to the right, but the peak’s spread increasingly narrows, testing an optimizer’s ability to follow a narrow path. In the (c) Fleeting Peaks landscape, fitness increases to the right, but optimization to the true peak is complicated by a series of small local optima. The (d) Gradient Gap landscape is complicated by a gradient-free zero-reward gap in an otherwise smooth landscape, highlighting ES’s ability to cross fitness plateaus (i.e. escape areas of the landscape where there is no local gradient). A control for the Gradient Gap landscape is the (e) Gradient Cliff landscape, wherein there is no promising area beyond the gap.
Figure 2: Search trajectory comparison in the Donut landscape. The plots compare representative trajectories of ES with decreasing variance to finite-differences gradient descent. With (a) high variance, ES maximizes expected fitness by moving the distribution’s mean into a low-fitness area. With (b,c) decreasing variance, ES is drawn closer to the edge of the low-fitness area, qualitatively converging to the behavior of (d) finite-difference gradient descent.
Overall, these landscapes, while simple, help to demonstrate that there are indeed systematic differences between ES and traditional gradient descent. They also show that no particular treatment is ideal in all cases, so the utility of the optimizing over a fixed-variance search distribution, at least for finding the global optimum, is (as would be expected) domain-dependent. The next section describes results in the Humanoid Locomotion domain that provide a proof-of-concept that these differences also manifest themselves when applying ES to modern deep RL benchmarks.
4 HUMANOID LOCOMOTION
In the Humanoid Locomotion domain, a simulated humanoid robot is controlled by an NN controller with the objective of producing a fast energy-efficient gait [3, 26], implemented in the Mujoco physics simulator [27]. Many RL methods are able to produce competent gaits, which this paper considers as achieving a fitness score of 6,000 averaged across many independent evaluations, following the threshold score in Salimans et al. [21]Salimans and colleagues; averaging is necessary because the domain is stochastic. The purpose of this experiment is not to compare performance across methods as is typical in RL, but instead to examine the robustness of solutions, as defined by the distribution of performance in the neighborhood of solutions.
Three methods are compared in this experiment: ES, GA, and TRPO. Both ES and GA directly search through the parameter space for solutions, while TRPO uses gradient descent to modify policies directedly to more often take actions resulting in higher reward. All methods optimize the same underlying NN architecture, which is a feedforward NN with two hidden layers of 256 Tanh units, comprising approximately 167,000 weight parameters (recall that ES optimizes the same number of parameters, but that they represent the mean of a search distribution over domain parameters). This NN architecture is taken from the configuration file released with the source code from Salimans et al. [21]Salimans and colleagues. The architecture described in their paper is similar, but smaller, having 64 neurons per layer [21].
The hypothesis is that ES policies will be more robust to policy perturbations than policies of similar performance generated by either GA or TRPO. The GA of Petroski Such et al. [17]Petroski Such and colleagues provides a natural control, because its mutation operator is the same that generates variation within ES, but its objective function does not directly reward robustness. Note that ES is trained with policy perturbations from a Gaussian distribution with σ=0.02sigma equals 0.02 while the GA required a much narrower distribution (σ=0.00224sigma equals 0.00224) for
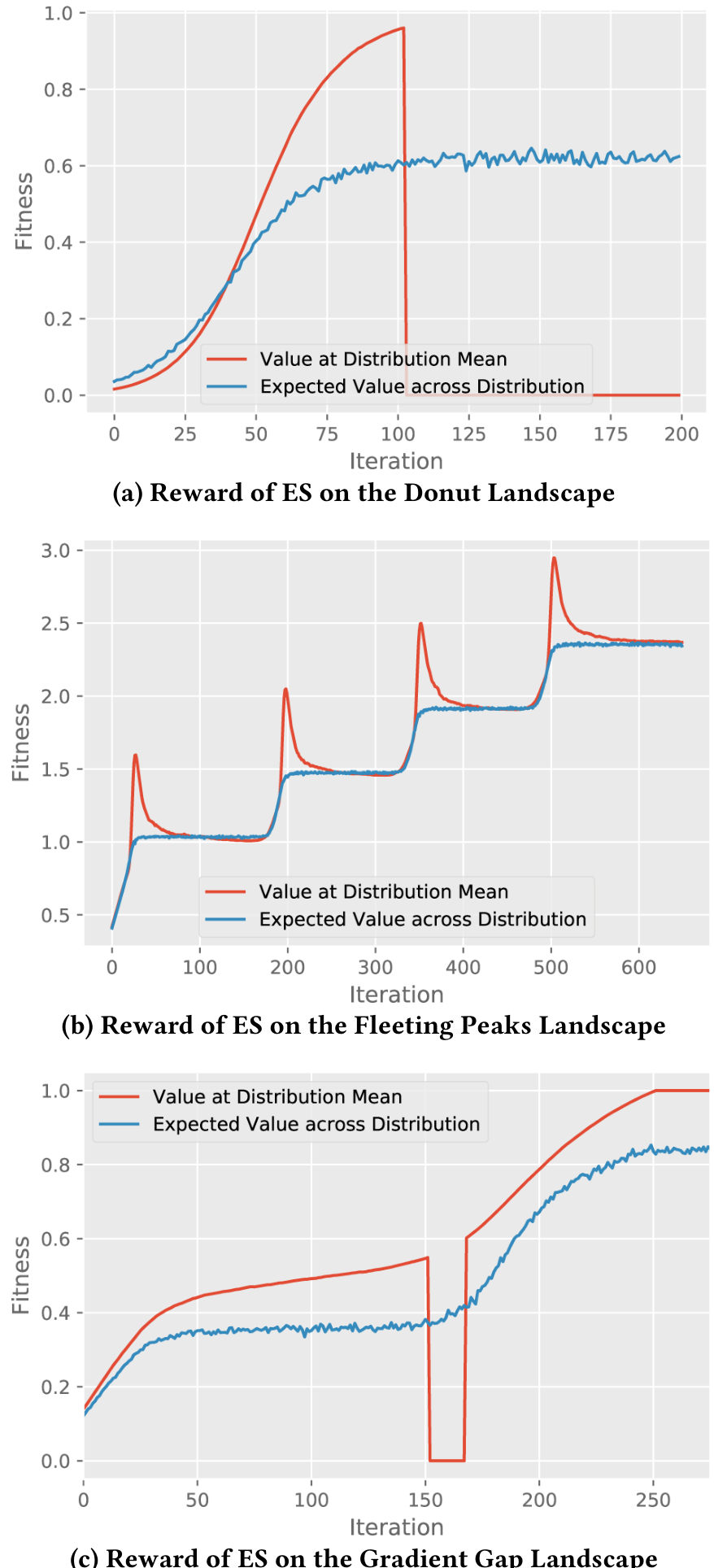
Figure 3: ES maximizes expected value over the search distribution. These plots show how the expected value of fitness and the fitness value evaluated at the distribution’s mean can diverge in representative runs of ES. This divergence is shown on (a) the Donut landscape with high variance σ=0.16sigma equals zero point one six, (b) the Fleeting Peaks landscape with medium variance σ=0.048sigma equals zero point zero four eight, and (c) the Gradient Gap landscape with high variance σ=0.18sigma equals zero point one eight.
successful training [17]; training the GA with a larger mutational distribution destabilized evolution, as mutation too rarely would preserve or improve performance to support adaptation. Interestingly, this destabilization itself supports the idea that robustness to high variance perturbations is not pervasive throughout this
Figure 4: Search trajectory comparison in the Narrowing Path landscape. With (a) high variance, ES cannot proceed as the path narrows because its distribution increasingly falls outside the path. Importantly, if ES is being used to ultimately discover a single high-value policy, as is often the case [21], this method will not discover the superior solutions further down the path. With (b,c) decreasing variance, ES is able to traverse further along the narrowing path. (d) FD gradient descent traverses the entire path.
search space. TRPO provides another useful control, because it follows the gradient of increasing performance without generating any random parameter perturbations; thus if the robustness of ES solutions is higher than that of those from TRPO, it also provides evidence that ES’s behavior is distinct, i.e. it is not best understood as simply following the gradient of improving performance with respect to domain parameters (as TRPO does). Note that this argument does not imply that TRPO is deficient if its policies are less robust to random parameter perturbations than ES, as such random perturbations are not part of its search process.
The experimental methodology is to take solutions from different methods and examine the distribution of resulting performance when policies are perturbed with the perturbation size of ES and of GA. In particular, policies are taken from generation 1,000 of the GA, from iteration 100 of ES, and from iteration 350 of TRPO, where methods have approximately evolved a solution of ≈6,000approximately six thousand fitness. The ES is run with hyperparameters according to Salimans et al. [21]Salimans and colleagues, the GA is taken from Petroski Such et al. [17]Petroski Such and colleagues, and TRPO is based on OpenAI’s baselines package [7]. Exact hyperparameters are listed in the supplemental material.
4.1 Results
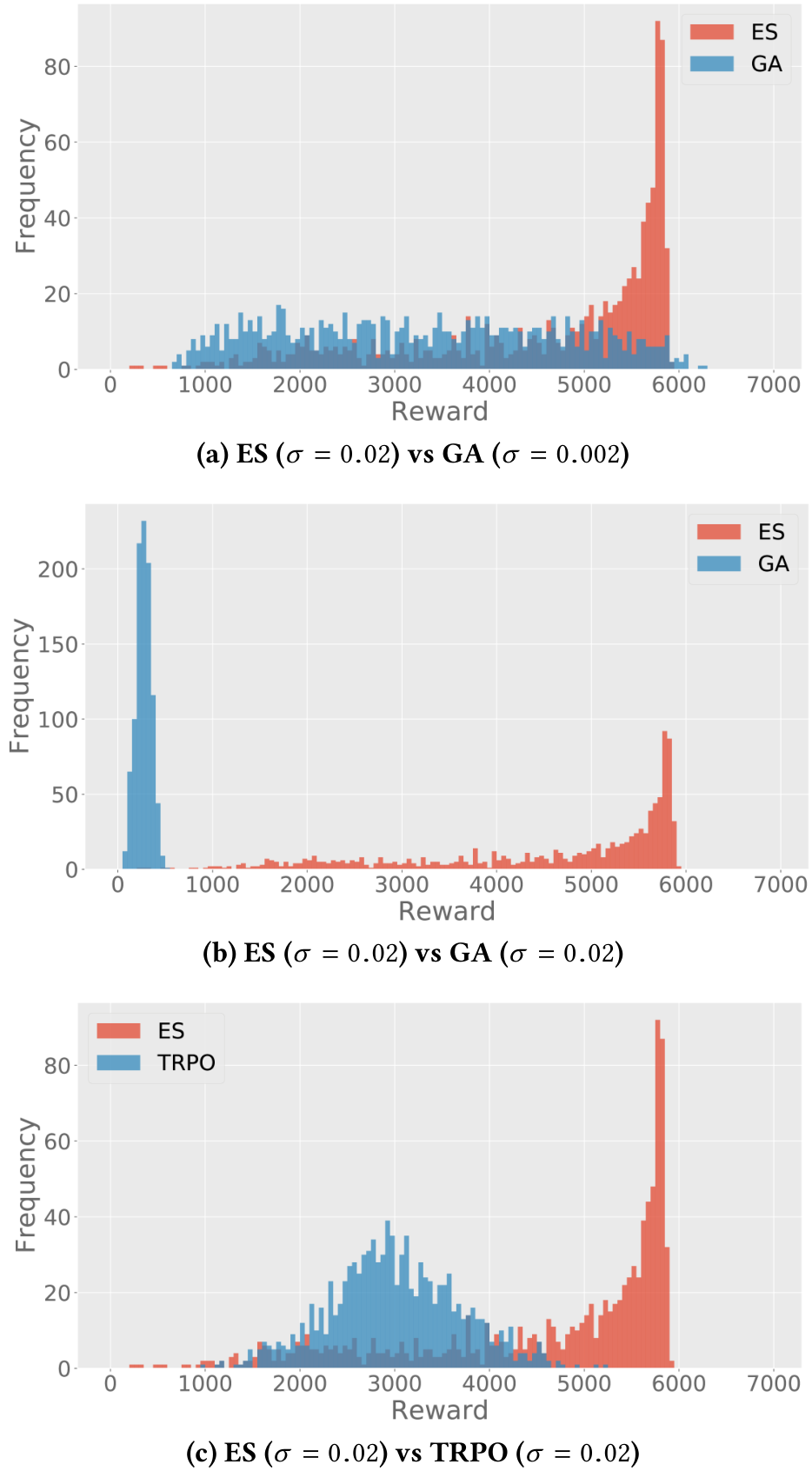
Figure 7 shows a representative example of the stark difference between the robustness of ES solutions and those from the GA or
Figure 5: Search trajectory comparison in the Fleeting Peaks landscape. With (a) high variance, ES ignores the local optima because of their relatively small contribution to expected fitness. With (b) medium variance, ES hops between local optima, and with (c) low variance, ES converges to a local optimum, as does (d) FD gradient descent.
TRPO, even when the GA is subject only to the lower-variance perturbations that were applied during evolution. We observed that this result appears consistent across independently trained models. A video comparing perturbed policies of ES and TRPO can be viewed at the following URL (along with other videos showing selected fitness landscape animations). Note that future work could explore whether modifications to the vanilla GA would result in similar robustness as ES [13, 16].
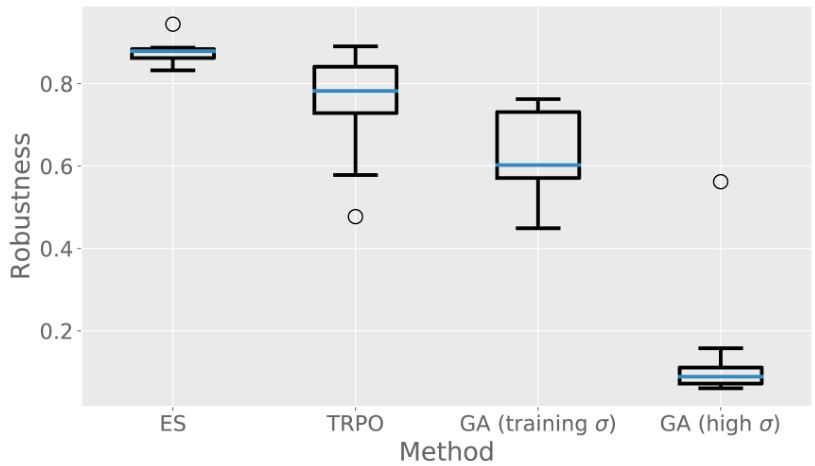
To further explore this robustness difference, a quantitative measure of robustness was also applied. In particular, for each model, the original parameter vector’s reward was calculated by averaging its performance over 1,000 trials in the environment. Then, 1,000 perturbations were generated for each model, and each perturbation’s performance was averaged over 100 trials in the environment. Finally, a robustness score is calculated for each model as the ratio of the perturbations’ median performance to the unperturbed policy’s performance, i.e. a robustness score of 0.5 indicates that the median perturbation performs half as well as the unperturbed model. The results (shown in figure 8) indicate that indeed by this measure ES is significantly more robust than the GA or TRPO (Mann-Whitney U-test; p<0.01p less than zero point zero one). The conclusion is that the robustness-seeking property of ES demonstrated in the simple landscapes also manifests itself in this more challenging and high-dimensional domain. Interestingly, TRPO is significantly more robust than both GA treatments (Mann-Whitney U-test; p<0.01p less than zero point zero one) even though it is not driven by random perturbations; future work could probe the relationship between the SGD updates of policy gradient methods and the random perturbations applied by ES and the GA.
5 DISCUSSION AND CONCLUSION
An important contribution of this paper is to ensure that awareness of the robustness-seeking property of ES, especially with higher σsigma, is not lost – which is a risk when ES is described as simply performing stochastic finite differences. When σsigma is above some threshold, it is not accurate to interpret ES as merely an approximation of SGD, nor as a traditional FD-based approximator. Rather, it becomes a gradient approximator coupled with a compass that seeks areas of the search space robust to parameter perturbations. This latter property is not easily available to point-based gradient methods, as highlighted dramatically in the Humanoid Locomotion experiments in this paper. On the other hand, if one wants ES to better mimic FD and SGD, that option is still feasible simply by reducing σsigma.
The extent to which seeking robustness to parameter perturbation is important remains open to further research. As shown in the landscape experiments, when it comes to finding optima, it clearly depends on the domain. If the search space is reminiscent of Fleeting Peaks, then ES is likely an attractive option for reaching the global optimum. However, if it is more like the Narrowing Path landscape, especially if the ultimate goal is a single solution (and there is no concern about its robustness), then high-sigma ES is less attractive (and the lower-sigma ES explored in Zhang et al. [34]Zhang and colleagues would be more appropriate). It would be interesting to better understand whether and under what conditions domains more often resemble Fleeting Peaks as opposed to the Narrowing Path.
An intriguing question that remains open is when and why such robustness might be desirable even for reasons outside of global optimality. For example, it is possible that policies encoded by networks in robust regions of the search space (i.e. where perturbing parameters leads to networks of similar performance) are also robust to other kinds of noise, such as domain noise. It is interesting to speculate on this possibility, but at present it remains a topic for future investigation. Perhaps parameter robustness also correlates to robustness to new opponents in coevolution or self-play, but that again cannot yet be answered. Another open question is how robustness interacts with divergent search techniques like novelty search [12] or quality diversity methods [19]; follow-up experiments to Conti et al. [5]Conti and colleagues, which combines ES with novelty search, could explore this issue. Of course, the degree to which the implications of robustness matter likely varies by domain as well. For example, in the Humanoid Locomotion task the level of domain noise means that there is little choice but to choose a higher σsigma during evolution (because otherwise the effects of perturbations could be drowned out by noise), but in a domain like MNIST there is no obvious need for anything but an SGD-like process [34].
Another benefit of robustness is that it could indicate compressibility: If small mutations tend not to impact functionality (as is the case for robust NNs), then less numerical precision is required to specify an effective set of network weights (i.e. fewer bits are required to encode them). This issue too is presently unexplored.
This study focused on ES, but it raises new questions about other related algorithms. For instance, non-evolutionary methods may be modified to include a drive towards robustness or may already share abstract connections with ES. For example, stochastic
Figure 6: Search trajectory comparison in the Gradient Gap and Gradient Cliff landscapes. With (a) high variance, ES can bypass the gradient-free gap because its distribution can span the gap; with lower-variance ES or (b) FD, search cannot cross the gap. When (c) FD is augmented with momentum, it too can jump across the gap. In the control Gradient Cliff landscape, (d) ES with high variance remains rooted in the high-fitness area, and the performance of (e) FD is unchanged from the Gradient Gap landscape. When (f) FD is combined with momentum, it jumps into the fitness chasm. The conclusion is that only high-variance ES exploits distributional information to make an informed choice about whether or not to move across the gap.
gradient Langevin dynamics [30], a Bayesian approach to SGD, approximates a distribution of solutions over iterations of training by adding Gaussian noise to SGD updates, in effect also producing a solution cloud. Additionally, it is possible that methods combining parameter-space exploration with policy gradients (such as Plappert et al. [18])such as prior work by Plappert and colleagues could be modified to include robustness pressure.
A related question is, do all population-based EAs possess at least the potential for the same tendency towards robustness [15, 28, 32]? Perhaps some such algorithms have a different means of turning the knob between gradient following and robustness seeking, but nevertheless in effect leave room for the same dual tendencies. One particularly interesting relative of ES is the NES [31], which adjusts σsigma dynamically over the run. Given that σsigma seems instrumental in the extent to which robustness becomes paramount, characterizing the tendency of NES in this respect is also important future work.
We hope ultimately that the brief demonstration in this work can serve as a reminder that the analogy between ES and FD only goes so far, and there are therefore other intriguing properties of ES that remain to be investigated.
ACKNOWLEDGEMENTS
We thank the members of Uber AI Labs, in particular Thomas Miconi, Martin Jankowiak, Rui Wang, Xingwen Zhang, and Zoubin Ghahramani for helpful discussions; Felipe Such for his GA implementation and Edoardo Conti for his ES implementation. We also thank Justin Pinkul, Mike Deats, Cody Yancey, Joel Snow, Leon Rosenshein and the entire OpusStack Team inside Uber for providing our computing platform and for technical support.
REFERENCES
[references omitted]
Figure 7: ES is more robust to parameter perturbation in the Humanoid Locomotion task. The distribution of reward is shown from perturbing models trained by ES, GA, and TRPO. Models were trained to a fitness value of 6,000 reward, and robustness is evaluated by generating perturbations with Gaussian noise (with the specified variance) and evaluating perturbed policies in the domain. High-variance perturbations of ES produce a healthier distribution of reward than do perturbations of GA or TRPO.
Figure 8: Quantitative measure of robustness across independent runs of ES, GA, and TRPO. The distribution of reward is shown from perturbing ten independent models for each of ES, GA, and TRPO under the high-variance perturbations used to train ES (σ=0.02)sigma equals 0.02. Results from GA are shown also for perturbations drawn from the lower-variance distribution it experienced during training (σ=0.00224)sigma equals 0.00224. The conclusion is that high-variance perturbations of ES retain significantly higher performance than do perturbations of GA or TRPO (Mann-Whitney U-test; p<0.01p less than 0.01).
How evolution learns to improve evolvability on rugged fitness landscapes. arXiv
[references omitted]
SUPPLEMENTAL MATERIAL:
HYPERPARAMETERS
This section describes the relevant hyperparameters for the search methods (ES, GA, and TRPO) applied in the Humanoid Walker experiments.
ES
The ES algorithm was based on Salimans et al. [21]Salimans and colleagues and uses the same hyperparameters as in their Humanoid Walker experiment. In particular, 10,000 domain roll-outs were used per iteration of the algorithm, with a fixed σsigma of the parameter distribution set to 0.02. Note that the σsigma hyperparameter was not selected to maximize robustness (i.e. it was taken from Salimans et al. [21]prior work, and it was chosen there for performance reasons). The ADAM optimizer was applied with a step-size of 0.01.
Analyzed champions were taken from iteration 100 of ES, i.e. a total of 1,000,000 domain roll-outs were expended to reach that point in the search.
GA
The GA was based on Petroski Such et al. [17]Petroski Such and colleagues. The population size was set to 12,501, and σsigma of the normal distribution used to generate mutation perturbations was set to 0.00224. Truncation selection was performed, and only the highest-performing 5% of the population survived. The fitness score for each individual was the average of five noisy domain roll-outs.
Analyzed GA champions were taken from generation 1,000 of the GA, which means a total of 62,505,000 domain evaluations were expended to reach that point. For each run, the 20 highest-fitness individuals in the population were each evaluated in 100 additional domain roll-outs, and the individual with average performance closest to 6,000 was the one selected for further analysis.
TRPO
The TRPO [22]TRPO implementation was taken from the OpenAI baselines package [7]. The maximum KL divergence was set to 0.1 and 10 iterations of conjugate gradients were conducted per batch of training data. Discount rate (γgamma) was set to 0.99.
Analyzed policies were taken from independent runs at iteration 350, and each run was parallelized across 60 worker threads. Each iteration consumes 1,024 simulation steps for each worker thread, thus requiring a total of 21,504,000 simulation steps. While it is difficult to make a direct comparison between the number of simulation steps (for TRPO) and complete domain rollouts (i.e. episodes run from beginning to end, for GA and ES), on a gross level TRPO did require less simulation computation than either ES or GA (i.e. TRPO was more sample efficient in this domain).