We present graph attention networks (GATs), novel neural network architectures that operate on graph-structured data, leveraging masked self-attentional layers to address the shortcomings of prior methods based on graph convolutions or their approximations. By stacking layers in which nodes are able to attend over their neighborhoods’ features, we enable (implicitly) specifying different weights to different nodes in a neighborhood, without requiring any kind of costly matrix operation (such as inversion) or depending on knowing the graph structure upfront. In this way, we address several key challenges of spectral-based graph neural networks simultaneously, and make our model readily applicable to inductive as well as transductive problems. Our GAT models have achieved or matched state-of-the-art results across four established transductive and inductive graph benchmarks: the Cora, Citeseer and Pubmed citation network datasets, as well as a protein-protein interaction dataset (wherein test graphs remain unseen during training).
1 INTRODUCTION
Convolutional Neural Networks (CNNs) have been successfully applied to tackle problems such as image classification (He et al., 2016)He and colleagues, 2016, semantic segmentation (Jégou et al., 2017)Jégou and colleagues, 2017 or machine translation (Gehring et al., 2016)Gehring and colleagues, 2016, where the underlying data representation has a grid-like structure. These architectures efficiently reuse their local filters, with learnable parameters, by applying them to all the input positions.
However, many interesting tasks involve data that can not be represented in a grid-like structure and that instead lies in an irregular domain. This is the case of 3D meshes, social networks, telecommunication networks, biological networks or brain connectomes. Such data can usually be represented in the form of graphs.
There have been several attempts in the literature to extend neural networks to deal with arbitrarily structured graphs. Early work used recursive neural networks to process data represented in graph domains as directed acyclic graphs (Frasconi et al., 1998; Sperduti & Starita, 1997)Frasconi et al., 1998; Sperduti and Starita, 1997. Graph Neural Networks (GNNs) were introduced in Gori et al. (2005)Gori and colleagues and Scarselli et al. (2009)Scarselli and colleagues as a generalization of recursive neural networks that can directly deal with a more general class of graphs, e.g. cyclic, directed and undirected graphs. GNNs consist of an iterative process, which propagates the node states until equilibrium; followed by a neural network, which produces an output for each node
*Work performed while the author was at the Montréal Institute for Learning Algorithms.
based on its state. This idea was adopted and improved by Li et al. (2016)Li and colleagues, which propose to use gated recurrent units (Cho et al., 2014)proposed by Cho and colleagues in the propagation step.
Nevertheless, there is an increasing interest in generalizing convolutions to the graph domain. Advances in this direction are often categorized as spectral approaches and non-spectral approaches.
On one hand, spectral approaches work with a spectral representation of the graphs and have been successfully applied in the context of node classification. In Bruna et al. (2014)work by Bruna and colleagues, the convolution operation is defined in the Fourier domain by computing the eigendecomposition of the graph Laplacian, resulting in potentially intense computations and non-spatially localized filters. These issues were addressed by subsequent works. Henaff et al. (2015)Henaff and colleagues introduced a parameterization of the spectral filters with smooth coefficients in order to make them spatially localized. Later, Defferrard et al. (2016)Defferrard and colleagues proposed to approximate the filters by means of a Chebyshev expansion of the graph Laplacian, removing the need to compute the eigenvectors of the Laplacian and yielding spatially localized filters. Finally, Kipf & Welling (2017)Kipf and Welling simplified the previous method by restricting the filters to operate in a 1-step neighborhood around each node. However, in all of the aforementioned spectral approaches, the learned filters depend on the Laplacian eigenbasis, which depends on the graph structure. Thus, a model trained on a specific structure can not be directly applied to a graph with a different structure.
On the other hand, we have non-spectral approaches (Duvenaud et al., 2015; Atwood & Towsley, 2016; Hamilton et al., 2017), which define convolutions directly on the graph, operating on groups of spatially close neighbors. One of the challenges of these approaches is to define an operator which works with different sized neighborhoods and maintains the weight sharing property of CNNs. In some cases, this requires learning a specific weight matrix for each node degree (Duvenaud et al., 2015), using the powers of a transition matrix to define the neighborhood while learning weights for each input channel and neighborhood degree (Atwood & Towsley, 2016), or extracting and normalizing neighborhoods containing a fixed number of nodes (Niepert et al., 2016). Monti et al. (2016)Monti and colleagues presented mixture model CNNs (MoNet), a spatial approach which provides a unified generalization of CNN architectures to graphs. More recently, Hamilton et al. (2017)Hamilton and colleagues introduced GraphSAGE, a method for computing node representations in an inductive manner. This technique operates by sampling a fixed-size neighborhood of each node, and then performing a specific aggregator over it (such as the mean over all the sampled neighbors’ feature vectors, or the result of feeding them through a recurrent neural network). This approach has yielded impressive performance across several large-scale inductive benchmarks.
Attention mechanisms have become almost a de facto standard in many sequence-based tasks (Bahdanau et al., 2015; Gehring et al., 2016). One of the benefits of attention mechanisms is that they allow for dealing with variable sized inputs, focusing on the most relevant parts of the input to make decisions. When an attention mechanism is used to compute a representation of a single sequence, it is commonly referred to as self-attention or intra-attention. Together with Recurrent Neural Networks (RNNs) or convolutions, self-attention has proven to be useful for tasks such as machine reading (Cheng et al., 2016) and learning sentence representations (Lin et al., 2017). However, Vaswani et al. (2017)Vaswani and colleagues showed that not only self-attention can improve a method based on RNNs or convolutions, but also that it is sufficient for constructing a powerful model obtaining state-of-the-art performance on the machine translation task.
Inspired by this recent work, we introduce an attention-based architecture to perform node classification of graph-structured data. The idea is to compute the hidden representations of each node in the graph, by attending over its neighbors, following a self-attention strategy. The attention architecture has several interesting properties: (1) the operation is efficient, since it is parallelizable across node-neighbor pairs; (2) it can be applied to graph nodes having different degrees by specifying arbitrary weights to the neighbors; and (3) the model is directly applicable to inductive learning problems, including tasks where the model has to generalize to completely unseen graphs. We validate the proposed approach on four challenging benchmarks: Cora, Citeseer and Pubmed citation networks as well as an inductive protein-protein interaction dataset, achieving or matching state-of-the-art results that highlight the potential of attention-based models when dealing with arbitrarily structured graphs.
It is worth noting that, as Kipf & Welling (2017)Kipf and Welling and Atwood & Towsley (2016)Atwood and Towsley, our work can also be reformulated as a particular instance of MoNet (Monti et al., 2016). Moreover, our approach of
sharing a neural network computation across edges is reminiscent of the formulation of relational networks (Santoro et al., 2017)by Santoro and colleagues and VAIN (Hoshen, 2017)by Hoshen, wherein relations between objects or agents are aggregated pair-wise, by employing a shared mechanism. Similarly, our proposed attention model can be connected to the works by Duan et al. (2017)Duan and colleagues and Denil et al. (2017)Denil and colleagues, which use a neighborhood attention operation to compute attention coefficients between different objects in an environment. Other related approaches include locally linear embedding (LLE) (Roweis & Saul, 2000) and memory networks (Weston et al., 2014). LLE selects a fixed number of neighbors around each data point, and learns a weight coefficient for each neighbor to reconstruct each point as a weighted sum of its neighbors. A second optimization step extracts the point’s feature embedding. Memory networks also share some connections with our work, in particular, if we interpret the neighborhood of a node as the memory, which is used to compute the node features by attending over its values, and then is updated by storing the new features in the same position.
2 GAT ARCHITECTURE
In this section, we will present the building block layer used to construct arbitrary graph attention networks (through stacking this layer), and directly outline its theoretical and practical benefits and limitations compared to prior work in the domain of neural graph processing.
2.1 GRAPH ATTENTIONAL LAYER
We will start by describing a single graph attentional layer, as the sole layer utilized throughout all of the GAT architectures used in our experiments. The particular attentional setup utilized by us closely follows the work of Bahdanau et al. (2015)Bahdanau and colleagues—but the framework is agnostic to the particular choice of attention mechanism.
The input to our layer is a set of node features, h={h1,h2,…,hN},hi∈RFh, defined as a set of vectors h one through h N, where each h i is in R F, where NN is the number of nodes, and FF is the number of features in each node. The layer produces a new set of node features (of potentially different cardinality F′), h′={h1′,h2′,…,hN′},hi′∈RF′h prime, containing vectors h one prime through h N prime, where each is in R F prime, as its output.
In order to obtain sufficient expressive power to transform the input features into higher-level features, at least one learnable linear transformation is required. To that end, as an initial step, a shared linear transformation, parametrized by a weight matrix, W∈RF′×FW of dimensions F prime by F, is applied to every node. We then perform self-attention on the nodes—a shared attentional mechanism a:RF′×RF′→Ra, mapping from R F prime cross R F prime to the real numbers computes attention coefficients
eij=a(Whi,Whj)(1)
e i j equals a of W h i and W h j
that indicate the importance of node j’s features to node i. In its most general formulation, the model allows every node to attend on every other node, dropping all structural information. We inject the graph structure into the mechanism by performing masked attention—we only compute eij for nodes j∈Nij in the neighborhood N i, where NiN i is some neighborhood of node i in the graph. In all our experiments, these will be exactly the first-order neighbors of i (including i). To make coefficients easily comparable across different nodes, we normalize them across all choices of j using the softmax function:
alpha i j is the softmax of e i j over the neighborhood
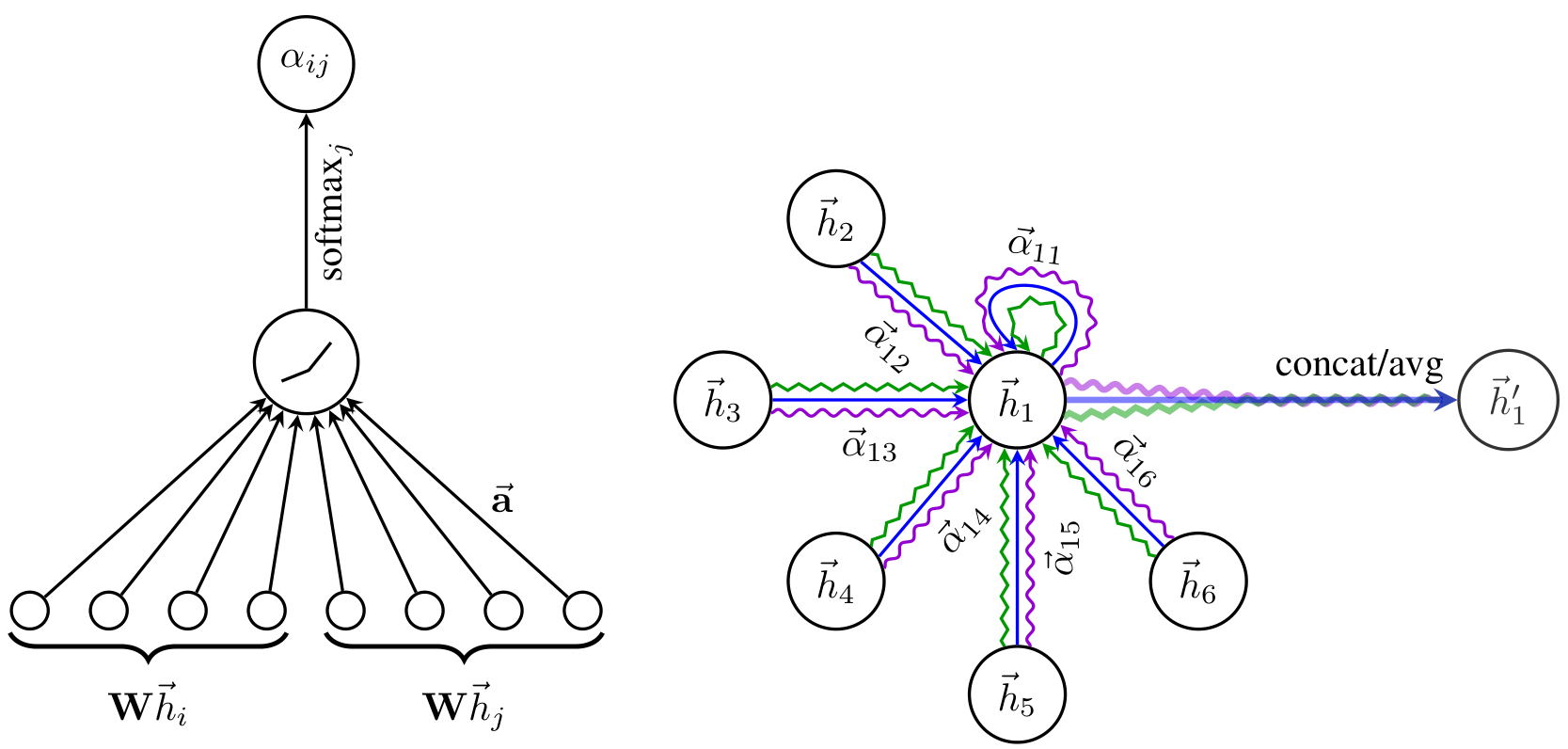
In our experiments, the attention mechanism a is a single-layer feedforward neural network, parametrized by a weight vector a∈R2F′a in R two F prime, and applying the LeakyReLU nonlinearity (with negative input slope α=0.2alpha equals zero point two). Fully expanded out, the coefficients computed by the attention mechanism (illustrated by Figure 1 (left)) may then be expressed as:
where ⋅T represents transposition and ∥ is the concatenation operation.
Once obtained, the normalized attention coefficients are used to compute a linear combination of the features corresponding to them, to serve as the final output features for every node (after potentially
Published as a conference paper at ICLR 2018
Figure 1: Left: The attention mechanism a(Whi,Whj) employed by our model, parametrized by a weight vector a∈R2F′, applying a LeakyReLU activation. Right: An illustration of multi-head attention (with K=3 heads) by node 1 on its neighborhood. Different arrow styles and colors denote independent attention computations. The aggregated features from each head are concatenated or averaged to obtain h1′.
applying a nonlinearity, σsigma):
hi′=σj∈Ni∑αijWhj(4)
h prime sub i is equal to sigma of the sum over the neighborhood of i of alpha i j times W h sub j
To stabilize the learning process of self-attention, we have found extending our mechanism to employ multi-head attention to be beneficial, similarly to Vaswani et al. (2017)Vaswani and colleagues. Specifically, KK independent attention mechanisms execute the transformation of Equation 4, and then their features are concatenated, resulting in the following output feature representation:
hi′=∥k=1Kσj∈Ni∑αijkWkhj(5)
h prime sub i equals the concatenation from k equals one to K of sigma of the sum over the neighborhood of i of alpha i j k times W k h sub j
where ∥the parallel bars symbol represents concatenation, αijkalpha i j k are normalized attention coefficients computed by the kk-th attention mechanism (aka k), and WkW k is the corresponding input linear transformation’s weight matrix. Note that, in this setting, the final returned output, h′h prime, will consist of KF′K F prime features (rather than F′F prime) for each node.
Specially, if we perform multi-head attention on the final (prediction) layer of the network, concatenation is no longer sensible—instead, we employ averaging, and delay applying the final nonlinearity (usually a softmax or logistic sigmoid for classification problems) until then:
hi′=σK1k=1∑Kj∈Ni∑αijkWkhj(6)
h prime sub i equals sigma of one over K times the double summation over heads k and neighborhood j of alpha i j k times W k h sub j
The aggregation process of a multi-head graph attentional layer is illustrated by Figure 1 (right).
2.2 COMPARISONS TO RELATED WORK
The graph attentional layer described in subsection 2.1 directly addresses several issues that were present in prior approaches to modelling graph-structured data with neural networks:
Computationally, it is highly efficient: the operation of the self-attentional layer can be parallelized across all edges, and the computation of output features can be parallelized across
all nodes. No eigendecompositions or similar costly matrix operations are required. The time complexity of a single GAT attention head computing F′F prime features may be expressed as O(∣V∣FF′+∣E∣F′)big O of the number of nodes times F F prime plus the number of edges times F prime, where FF is the number of input features, and ∣V∣V and ∣E∣E are the numbers of nodes and edges in the graph, respectively. This complexity is on par with the baseline methods such as Graph Convolutional Networks (GCNs) (Kipf & Welling, 2017)G C Ns, as described by Kipf and Welling in twenty seventeen. Applying multi-head attention multiplies the storage and parameter requirements by a factor of KK, while the individual heads’ computations are fully independent and can be parallelized.
As opposed to GCNs, our model allows for (implicitly) assigning different importances to nodes of a same neighborhood, enabling a leap in model capacity. Furthermore, analyzing the learned attentional weights may lead to benefits in interpretability, as was the case in the machine translation domain (e.g. the qualitative analysis of Bahdanau et al. (2015))for example, the qualitative analysis by Bahdanau and colleagues in twenty fifteen.
The attention mechanism is applied in a shared manner to all edges in the graph, and therefore it does not depend on upfront access to the global graph structure or (features of) all of its nodes (a limitation of many prior techniques). This has several desirable implications:
The graph is not required to be undirected (we may simply leave out computing αijalpha i j if edge j→ij to i is not present).
It makes our technique directly applicable to inductive learning—including tasks where the model is evaluated on graphs that are completely unseen during training.
The recently published inductive method of Hamilton et al. (2017)Hamilton and colleagues in twenty seventeen samples a fixed-size neighborhood of each node, in order to keep its computational footprint consistent; this does not allow it access to the entirety of the neighborhood while performing inference. Moreover, this technique achieved some of its strongest results when an LSTM (Hochreiter & Schmidhuber, 1997)L S T M-based neighborhood aggregator is used. This assumes the existence of a consistent sequential node ordering across neighborhoods, and the authors have rectified it by consistently feeding randomly-ordered sequences to the LSTM. Our technique does not suffer from either of these issues—it works with the entirety of the neighborhood (at the expense of a variable computational footprint, which is still on-par with methods like the GCN), and does not assume any ordering within it.
As mentioned in Section 1, GAT can be reformulated as a particular instance of MoNet (Monti et al., 2016)MoNet. More specifically, setting the pseudo-coordinate function to be u(x,y)=f(x)∥f(y)u of x comma y equals f of x concatenated with f of y, where f(x)f of x represent (potentially MLP-transformed) features of node xx and ∥the parallel symbol is concatenation; and the weight function to be wj(u)=softmax(MLP(u))w j of u equals the softmax of an M L P applied to u (with the softmax performed over the entire neighborhood of a node) would make MoNet’s patch operator similar to ours. Nevertheless, one should note that, in comparison to previously considered MoNet instances, our model uses node features for similarity computations, rather than the node’s structural properties (which would assume knowing the graph structure upfront).
We were able to produce a version of the GAT layer that leverages sparse matrix operations, reducing the storage complexity to linear in the number of nodes and edges and enabling the execution of GAT models on larger graph datasets. However, the tensor manipulation framework we used only supports sparse matrix multiplication for rank-2 tensors, which limits the batching capabilities of the layer as it is currently implemented (especially for datasets with multiple graphs). Appropriately addressing this constraint is an important direction for future work. Depending on the regularity of the graph structure in place, GPUs may not be able to offer major performance benefits compared to CPUs in these sparse scenarios. It should also be noted that the size of the “receptive field” of our model is upper-bounded by the depth of the network (similarly as for GCN and similar models). Techniques such as skip connections (He et al., 2016)by He and colleagues could be readily applied for appropriately extending the depth, however. Lastly, parallelization across all the graph edges, especially in a distributed manner, may involve a lot of redundant computation, as the neighborhoods will often highly overlap in graphs of interest.
3 EVALUATION
We have performed comparative evaluation of GAT models against a wide variety of strong baselines and previous approaches, on four established graph-based benchmark tasks (transductive as
well as inductive), achieving or matching state-of-the-art performance across all of them. This section summarizes our experimental setup, results, and a brief qualitative analysis of a GAT model’s extracted feature representations.
Cora
Citeseer
Pubmed
PPI
Task
Transductive
Transductive
Transductive
Inductive
# Nodes
2708 (1 graph)
3327 (1 graph)
19717 (1 graph)
56944 (24 graphs)
# Edges
5429
4732
44338
818716
# Features/Node
1433
3703
500
50
# Classes
7
6
3
121 (multilabel)
# Training Nodes
140
120
60
44906 (20 graphs)
# Validation Nodes
500
500
500
6514 (2 graphs)
# Test Nodes
1000
1000
1000
5524 (2 graphs)
Table 1: Summary of the datasets used in our experiments.
3.1 DATASETS
Transductive learning We utilize three standard citation network benchmark datasets—Cora, Citeseer and Pubmed (Sen et al., 2008)by Sen and colleagues—and closely follow the transductive experimental setup of Yang et al. (2016)Yang and colleagues. In all of these datasets, nodes correspond to documents and edges to (undirected) citations. Node features correspond to elements of a bag-of-words representation of a document. Each node has a class label. We allow for only 20 nodes per class to be used for training—however, honoring the transductive setup, the training algorithm has access to all of the nodes’ feature vectors. The predictive power of the trained models is evaluated on 1000 test nodes, and we use 500 additional nodes for validation purposes (the same ones as used by Kipf & Welling (2017)). The Cora dataset contains 2708 nodes, 5429 edges, 7 classes and 1433 features per node. The Citeseer dataset contains 3327 nodes, 4732 edges, 6 classes and 3703 features per node. The Pubmed dataset contains 19717 nodes, 44338 edges, 3 classes and 500 features per node.
Inductive learning We make use of a protein-protein interaction (PPI) dataset that consists of graphs corresponding to different human tissues (Zitnik & Leskovec, 2017). The dataset contains 20 graphs for training, 2 for validation and 2 for testing. Critically, testing graphs remain completely unobserved during training. To construct the graphs, we used the preprocessed data provided by Hamilton et al. (2017)Hamilton and colleagues. The average number of nodes per graph is 2372. Each node has 50 features that are composed of positional gene sets, motif gene sets and immunological signatures. There are 121 labels for each node set from gene ontology, collected from the Molecular Signatures Database (Subramanian et al., 2005), and a node can possess several labels simultaneously.
An overview of the interesting characteristics of the datasets is given in Table 1.
3.2 STATE-OF-THE-ART METHODS
Transductive learning For transductive learning tasks, we compare against the same strong baselines and state-of-the-art approaches as specified in Kipf & Welling (2017). This includes label propagation (LP) (Zhu et al., 2003), semi-supervised embedding (SemiEmb) (Weston et al., 2012), manifold regularization (ManiReg) (Belkin et al., 2006), skip-gram based graph embeddings (DeepWalk) (Perozzi et al., 2014), the iterative classification algorithm (ICA) (Lu & Getoor, 2003) and Planetoid (Yang et al., 2016). We also directly compare our model against GCNs (Kipf & Welling, 2017), as well as graph convolutional models utilising higher-order Chebyshev filters (Defferrard et al., 2016), and the MoNet model presented in Monti et al. (2016).
Inductive learning For the inductive learning task, we compare against the four different supervised GraphSAGE inductive methods presented in Hamilton et al. (2017). These provide a variety of approaches to aggregating features within a sampled neighborhood: GraphSAGE-GCN (which extends a graph convolution-style operation to the inductive setting), GraphSAGE-mean (taking
the elementwise mean value of feature vectors), GraphSAGE-LSTM (aggregating by feeding the neighborhood features into an LSTM) and GraphSAGE-pool (taking the elementwise maximization operation of feature vectors transformed by a shared nonlinear multilayer perceptron). The other transductive approaches are either completely inappropriate in an inductive setting or assume that nodes are incrementally added to a single graph, making them unusable for the setup where test graphs are completely unseen during training (such as the PPI dataset).
Additionally, for both tasks we provide the performance of a per-node shared multilayer perceptron (MLP) classifier (that does not incorporate graph structure at all).
3.3 EXPERIMENTAL SETUP
Transductive learning For the transductive learning tasks, we apply a two-layer GAT model. Its architectural hyperparameters have been optimized on the Cora dataset and are then reused for Citeseer. The first layer consists of K=8K equals eight attention heads computing F′=8F prime equals eight features each (for a total of 64 features), followed by an exponential linear unit (ELU) (Clevert et al., 2016)proposed by Clevert and colleagues in 2016 nonlinearity. The second layer is used for classification: a single attention head that computes CC features (where CC is the number of classes), followed by a softmax activation. For coping with the small training set sizes, regularization is liberally applied within the model. During training, we apply L2L two regularization with λ=0.0005lambda equals zero point zero zero zero five. Furthermore, dropout (Srivastava et al., 2014)as described by Srivastava and colleagues with p=0.6p equals zero point six is applied to both layers’ inputs, as well as to the normalized attention coefficients (critically, this means that at each training iteration, each node is exposed to a stochastically sampled neighborhood). Similarly as observed by Monti et al. (2016)Monti and colleagues, we found that Pubmed’s training set size (60 examples) required slight changes to the GAT architecture: we have applied K=8K equals eight output attention heads (instead of one), and strengthened the L2L two regularization to λ=0.001lambda equals zero point zero zero one. Otherwise, the architecture matches the one used for Cora and Citeseer.
Inductive learning For the inductive learning task, we apply a three-layer GAT model. Both of the first two layers consist of K=4K equals four attention heads computing F′=256F prime equals two hundred fifty-six features (for a total of 1024 features), followed by an ELU nonlinearity. The final layer is used for (multi-label) classification: K=6K equals six attention heads computing 121 features each, that are averaged and followed by a logistic sigmoid activation. The training sets for this task are sufficiently large and we found no need to apply L2L two regularization or dropout—we have, however, successfully employed skip connections (He et al., 2016)following the work of He and colleagues across the intermediate attentional layer. We utilize a batch size of 2 graphs during training. To strictly evaluate the benefits of applying an attention mechanism in this setting (i.e. comparing with a near GCN-equivalent model), we also provide the results when a constant attention mechanism, a(x,y)=1a of x and y equals one, is used, with the same architecture—this will assign the same weight to every neighbor.
Both models are initialized using Glorot initialization (Glorot & Bengio, 2010)by Glorot and Bengio and trained to minimize cross-entropy on the training nodes using the Adam SGD optimizer (Kingma & Ba, 2014)by Kingma and Ba with an initial learning rate of 0.01 for Pubmed, and 0.005 for all other datasets. In both cases we use an early stopping strategy on both the cross-entropy loss and accuracy (transductive) or micro-F1F one (inductive) score on the validation nodes, with a patience of 100 epochs1.
3.4 RESULTS
The results of our comparative evaluation experiments are summarized in Tables 2 and 3.
For the transductive tasks, we report the mean classification accuracy (with standard deviation) on the test nodes of our method after 100 runs, and reuse the metrics already reported in Kipf & Welling (2017)Kipf and Welling and Monti et al. (2016)Monti and colleagues for state-of-the-art techniques. Specifically, for the Chebyshev filter-based approach (Defferrard et al., 2016)by Defferrard and colleagues, we provide the maximum reported performance for filters of orders K=2K equals two and K=3K equals three. In order to fairly assess the benefits of the attention mechanism, we further evaluate a GCN model that computes 64 hidden features, attempting both the ReLU and ELU activation, and reporting (as GCN-64∗G C N sixty-four star) the better result after 100 runs (which was the ReLU in all three cases).
For the inductive task, we report the micro-averaged F1F one score on the nodes of the two unseen test graphs, averaged after 10 runs, and reuse the metrics already reported in Hamilton et al. (2017)Hamilton and colleagues for
Table 2: Summary of results in terms of classification accuracies, for Cora, Citeseer and Pubmed. GCN-64* corresponds to the best GCN result computing 64 hidden features (using ReLU or ELU).
Transductive
Method
Cora
Citeseer
Pubmed
MLP
55.1%
46.5%
71.4%
ManiReg (Belkin et al., 2006)
59.5%
60.1%
70.7%
SemiEmb (Weston et al., 2012)
59.0%
59.6%
71.7%
LP (Zhu et al., 2003)
68.0%
45.3%
63.0%
DeepWalk (Perozzi et al., 2014)
67.2%
43.2%
65.3%
ICA (Lu & Getoor, 2003)
75.1%
69.1%
73.9%
Planetoid (Yang et al., 2016)
75.7%
64.7%
77.2%
Chebyshev (Defferrard et al., 2016)
81.2%
69.8%
74.4%
GCN (Kipf & Welling, 2017)
81.5%
70.3%
79.0%
MoNet (Monti et al., 2016)
81.7 ± 0.5%
—
78.8 ± 0.3%
GCN-64*
81.4 ± 0.5%
70.9 ± 0.5%
79.0 ± 0.3%
GAT (ours)
83.0 ± 0.7%
72.5 ± 0.7%
79.0 ± 0.3%
Table 3: Summary of results in terms of micro-averaged F1F one scores, for the PPI dataset. GraphSAGE* corresponds to the best GraphSAGE result we were able to obtain by just modifying its architecture. Const-GAT corresponds to a model with the same architecture as GAT, but with a constant attention mechanism (assigning same importance to each neighbor; GCN-like inductive operator).
Inductive
Method
PPI
Random
0.396
MLP
0.422
GraphSAGE-GCN (Hamilton et al., 2017)
0.500
GraphSAGE-mean (Hamilton et al., 2017)
0.598
GraphSAGE-LSTM (Hamilton et al., 2017)
0.612
GraphSAGE-pool (Hamilton et al., 2017)
0.600
GraphSAGE*
0.768
Const-GAT (ours)
0.934 ± 0.006
GAT (ours)
0.973 ± 0.002
the other techniques. Specifically, as our setup is supervised, we compare against the supervised GraphSAGE approaches. To evaluate the benefits of aggregating across the entire neighborhood, we further provide (as GraphSAGE*) the best result we were able to achieve with GraphSAGE by just modifying its architecture (this was with a three-layer GraphSAGE-LSTM with [512,512,726]five hundred twelve, five hundred twelve, and seven hundred twenty six features computed in each layer and 128one hundred twenty eight features used for aggregating neighborhoods). Finally, we report the 10-run result of our constant attention GAT model (as Const-GAT), to fairly evaluate the benefits of the attention mechanism against a GCN-like aggregation scheme (with the same architecture).
Our results successfully demonstrate state-of-the-art performance being achieved or matched across all four datasets—in concordance with our expectations, as per the discussion in Section 2.2. More specifically, we are able to improve upon GCNs by a margin of 1.5% and 1.6% on Cora and Citeseer, respectively, suggesting that assigning different weights to nodes of a same neighborhood may be beneficial. It is worth noting the improvements achieved on the PPI dataset: Our GAT model improves by 20.5% w.r.t. the best GraphSAGE result we were able to obtain, demonstrating that our model has the potential to be applied in inductive settings, and that larger predictive power can be leveraged by observing the entire neighborhood. Furthermore, it improves by 3.9% w.r.t. Const-GAT (the identical architecture with constant attention mechanism), once again directly demonstrating the significance of being able to assign different weights to different neighbors.
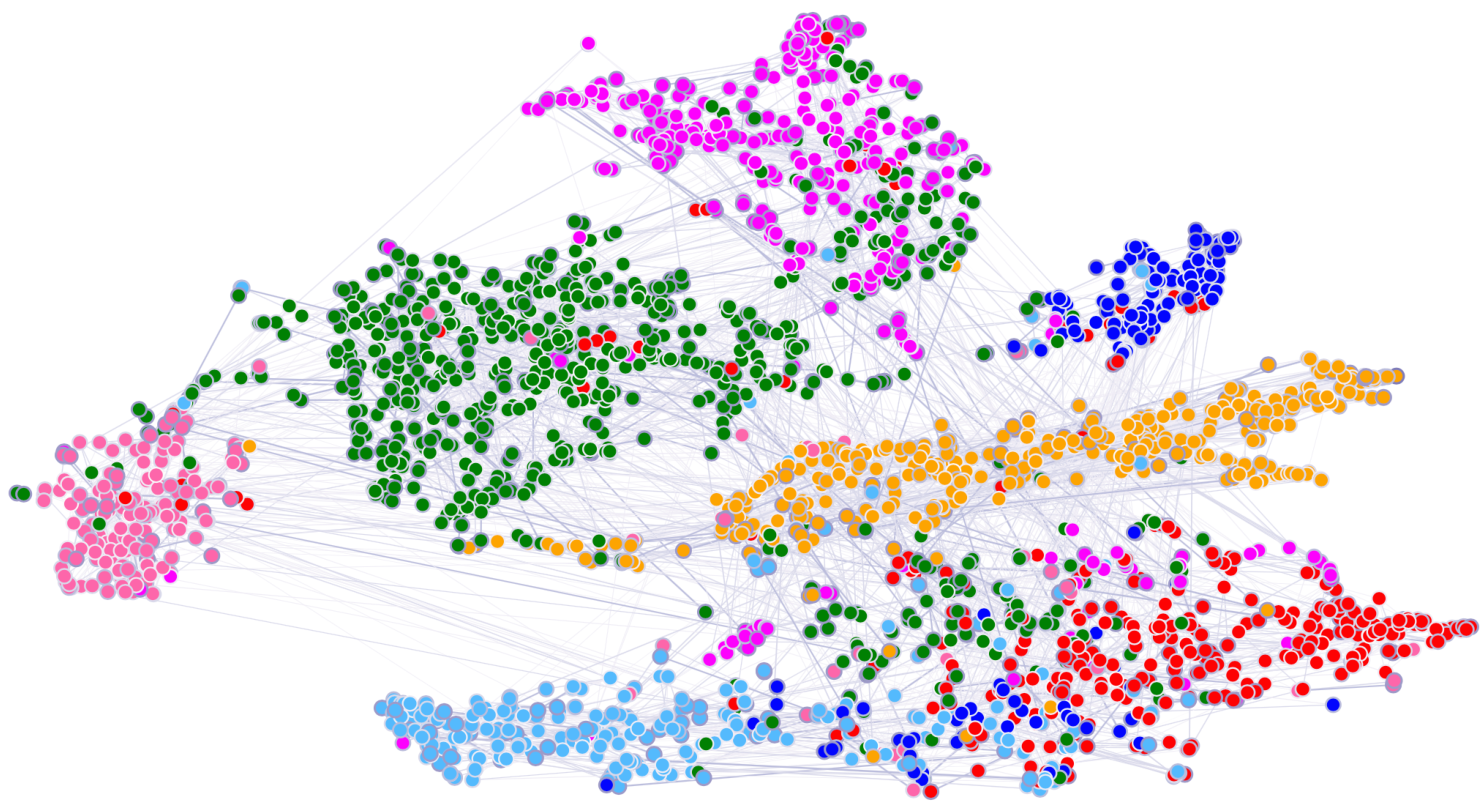
The effectiveness of the learned feature representations may also be investigated qualitatively—and for this purpose we provide a visualization of the t-SNE (Maaten & Hinton, 2008)Maaten and Hinton-transformed feature representations extracted by the first layer of a GAT model pre-trained on the Cora dataset (Figure 2). The representation exhibits discernible clustering in the projected 2D space. Note that these clusters correspond to the seven labels of the dataset, verifying the model’s discriminative power across the seven topic classes of Cora. Additionally, we visualize the relative strengths of the normalized attention coefficients (averaged across all eight attention heads). Properly interpreting these coefficients (as performed by e.g. Bahdanau et al. (2015))as performed by Bahdanau and colleagues will require further domain knowledge about the dataset under study, and is left for future work.
4 CONCLUSIONS
We have presented graph attention networks (GATs), novel convolution-style neural networks that operate on graph-structured data, leveraging masked self-attentional layers. The graph attentional layer utilized throughout these networks is computationally efficient (does not require costly matrix operations, and is parallelizable across all nodes in the graph), allows for (implicitly) assigning different importances to different nodes within a neighborhood while dealing with different sized neighborhoods, and does not depend on knowing the entire graph structure upfront—thus addressing many of the theoretical issues with previous spectral-based approaches. Our models leveraging attention have successfully achieved or matched state-of-the-art performance across four well-established node classification benchmarks, both transductive and inductive (especially, with completely unseen graphs used for testing).
There are several potential improvements and extensions to graph attention networks that could be addressed as future work, such as overcoming the practical problems described in subsection 2.2 to be able to handle larger batch sizes. A particularly interesting research direction would be taking advantage of the attention mechanism to perform a thorough analysis on the model interpretability. Moreover, extending the method to perform graph classification instead of node classification would also be relevant from the application perspective. Finally, extending the model to incorporate edge features (possibly indicating relationship among nodes) would allow us to tackle a larger variety of problems.
Figure 2: A t-SNE plot of the computed feature representations of a pre-trained GAT model’s first hidden layer on the Cora dataset. Node colors denote classes. Edge thickness indicates aggregated normalized attention coefficients between nodes i and j, across all eight attention heads (∑k=1Kαijk+αjik).
ACKNOWLEDGEMENTS
The authors would like to thank the developers of TensorFlow (Abadi et al., 2015). PV and PL have received funding from the European Union’s Horizon 2020 research and innovation programme PROPAG-AGEING under grant agreement No 634821. We further acknowledge the support of the following agencies for research funding and computing support: CIFAR, Canada Research Chairs, Compute Canada and Calcul Québec, as well as NVIDIA for the generous GPU support. Special thanks to: Benjamin Day and Fabian Jansen for kindly pointing out issues in a previous iteration of the paper; Michał Drożdżal for useful discussions, feedback and support; and Gaétan Marceau for reviewing the paper prior to submission.
References
[references omitted]
[references omitted]
[references omitted]
Footnotes
Our implementation of the GAT layer may be found at: GitHub↩