On the Measure of Intelligence
François Chollet
Google, Inc.
fchollet@google.com
November 5, 2019
Abstract
To make deliberate progress towards more intelligent and more human-like artificial systems, we need to be following an appropriate feedback signal: we need to be able to define and evaluate intelligence in a way that enables comparisons between two systems, as well as comparisons with humans. Over the past hundred years, there has been an abundance of attempts to define and measure intelligence, across both the fields of psychology and AI. We summarize and critically assess these definitions and evaluation approaches, while making apparent the two historical conceptions of intelligence that have implicitly guided them. We note that in practice, the contemporary AI community still gravitates towards benchmarking intelligence by comparing the skill exhibited by AIs and humans at specific tasks, such as board games and video games. We argue that solely measuring skill at any given task falls short of measuring intelligence, because skill is heavily modulated by prior knowledge and experience: unlimited priors or unlimited training data allow experimenters to “buy” arbitrary levels of skills for a system, in a way that masks the system’s own generalization power. We then articulate a new formal definition of intelligence based on Algorithmic Information Theory, describing intelligence as skill-acquisition efficiency and highlighting the concepts of scope, generalization difficulty, priors, and experience, as critical pieces to be accounted for in characterizing intelligent systems. Using this definition, we propose a set of guidelines for what a general AI benchmark should look like. Finally, we present a new benchmark closely following these guidelines, the Abstraction and Reasoning Corpus (ARC), built upon an explicit set of priors designed to be as close as possible to innate human priors. We argue that ARC can be used to measure a human-like form of general fluid intelligence and that it enables fair general intelligence comparisons between AI systems and humans.
Contents
- I Context and history
- I.1 Need for an actionable definition and measure of intelligence
- I.2 Defining intelligence: two divergent visions
- I.2.1 Intelligence as a collection of task-specific skills
- I.2.2 Intelligence as a general learning ability
- I.3 AI evaluation: from measuring skills to measuring broad abilities
- I.3.1 Skill-based, narrow AI evaluation
- I.3.2 The spectrum of generalization: robustness, flexibility, generality
- I.3.3 Measuring broad abilities and general intelligence: the psychometrics perspective
- I.3.4 Integrating AI evaluation and psychometrics
- I.3.5 Current trends in broad AI evaluation
- II A new perspective
- II.1 Critical assessment
- II.1.1 Measuring the right thing: evaluating skill alone does not move us forward
- II.1.2 The meaning of generality: grounding the g factor
- II.1.3 Separating the innate from the acquired: insights from developmental psychology
- II.2 Defining intelligence: a formal synthesis
- II.2.1 Intelligence as skill-acquisition efficiency
- II.2.2 Computation efficiency, time efficiency, energy efficiency, and risk efficiency
- II.2.3 Practical implications
- II.3 Evaluating intelligence in this light
- II.3.1 Fair comparisons between intelligent systems
- II.3.2 What to expect of an ideal intelligence benchmark
- III A benchmark proposal: the ARC dataset
- III.1 Description and goals
- III.1.1 What is ARC?
- III.1.2 Core Knowledge priors
- III.1.3 Key differences with psychometric intelligence tests
- III.1.4 What a solution to ARC may look like, and what it would imply for AI applications
- III.2 Weaknesses and future refinements
- III.3 Possible alternatives
- III.3.1 Repurposing skill benchmarks to measure broad generalization
- III.3.2 Open-ended adversarial or collaborative approaches
I Context and history
I.1 Need for an actionable definition and measure of intelligence
The promise of the field of AI, spelled out explicitly at its inception in the 1950s and repeated countless times since, is to develop machines that possess intelligence comparable to that of humans. But AI has since been falling short of its ideal: although we are able to engineer systems that perform extremely well on specific tasks, they have still stark limitations, being brittle, data-hungry, unable to make sense of situations that deviate slightly from their training data or the assumptions of their creators, and unable to repurpose themselves to deal with novel tasks without significant involvement from human researchers.
If the only successes of AI have been in developing narrow, task-specific systems, it is perhaps because only within a very narrow and grounded context have we been able to define our goal sufficiently precisely, and to measure progress in an actionable way. Goal definitions and evaluation benchmarks are among the most potent drivers of scientific progress. To make progress towards the promise of our field, we need precise, quantitative definitions and measures of intelligence – in particular human-like general intelligence. These would not be merely definitions and measures meant to describe or characterize intelligence, but precise, explanatory definitions meant to serve as a North Star, an objective function showing the way towards a clear target, capable of acting as a reliable measure of our progress and as a way to identify and highlight worthwhile new approaches that may not be immediately applicable, and would otherwise be discounted.
For instance, common-sense dictionary definitions of intelligence may be useful to make sure we are talking about the same concepts, but they are not useful for our purpose, as they are not actionable, explanatory, or measurable. Similarly, the Turing Test
It is a testimony to the immaturity of our field that the question of what we mean when we talk about intelligence still doesn’t have a satisfying answer. What’s worse, very little attention has been devoted to rigorously defining it or benchmarking our progress towards it.
We believe this lack of attention is a mistake, as the absence of widely-accepted ex
plicit definitions has been substituted with implicit definitions and biases that stretch back
decades. Though invisible, these biases are still structuring many research efforts today, as
illustrated by our field’s ongoing fascination with outperforming humans at board games or
video games (a trend we discuss in
out the implicit assumptions our field has been working from, correct some of its most
salient biases, and provide an actionable formal definition and measurement benchmark for
human-like general intelligence, leveraging modern insight from developmental cognitive
psychology.
I.2 Defining intelligence: two divergent visions
Looked at in one way, everyone knows what intelligence is; looked at in another way, no one does.
Robert J. Sternberg, 2000
Many formal and informal definitions of intelligence have been proposed over the past
few decades, although there is no existing scientific consensus around any single definition.
were asked to define intelligence, they all gave somewhat divergent answers. In the context
of AI research,
the literature into a single statement: “Intelligence measures an agent’s ability to achieve
goals in a wide range of environments.”
This summary points to two characterizations, which are nearly universally — but often separately — found in definitions of intelligence: one with an emphasis on task-specific
skill (“achieving goals”), and one focused on generality and adaptation (“in a wide range
of environments”). In this view, an intelligent agent would achieve high skill across many
different tasks (for instance, achieving high scores across many different video games). Implicitly here, the tasks may not necessarily be known in advance: to truly achieve generality,
the agent would have to be able to learn to handle new tasks (skill acquisition).
These two characterizations map to
cognitive abilities, the
two opposing views of the nature of the human mind that have been deeply influential in
cognitive science since the inception of the field
relatively static assembly of special-purpose mechanisms developed by evolution, only capable of learning what is it programmed to acquire, and another view in which the mind is
a general-purpose “blank slate” capable of turning arbitrary experience into knowledge and
skills, and that could be directed at any problem.
A central point of this document is to make explicit and critically assess this dual definition that has been implicitly at the foundation of how we have been conceptualizing and evaluating intelligence in the context of AI research: crystallized skill on one hand, skill-acquisition ability on the other. Understanding this intellectual context and its ongoing influence is a necessary step before we can propose a formal definition of intelligence from a modern perspective.
I.2.1 Intelligence as a collection of task-specific skills
In the distant future I see open fields for far more important researches. Psychology will be based on a new foundation, that of the necessary acquirement of each mental power and capacity by gradation.
Charles Darwin, 1859
The evolutionary psychology view of human nature is that much of the human cognitive function is the result of special-purpose adaptations that arose to solve specific problems encountered by humans throughout their evolution
This vision of the mind as a wide collection of vertical, relatively static programs that collectively implement “intelligence”, was most prominently endorsed by influential AI pioneer Marvin Minsky
This view of intelligence was once so dominant that “learning” (discounted as pure memorization) was often not even mentioned at all in AI textbooks until the mid-1980s. Even
paradox, as pointed out by
I.2.2 Intelligence as a general learning ability
Presumably the child brain is something like a notebook as one buys it from the stationer’s. Rather little mechanism, and lots of blank sheets.
— Alan Turing, 1950
In contrast, a number of researchers have taken the position that intelligence lies in the general ability to acquire new skills through learning; an ability that could be directed to a wide range of previously unknown problems — perhaps even any problem at all. Contrast Minsky’s task-focused definition of AI with the following one, paraphrased from
The notion that machines could acquire new skills through a learning process similar to that of human children was initially laid out by Turing in his 1950 paper
This view of intelligence echoes another long-standing conception of human nature that has had a profound influence on the history of cognitive science, contrasting with the evolutionary psychology perspective: Locke’s Tabula Rasa (blank slate), a vision of the mind as a flexible, adaptable, highly general process that turns experience into behavior, knowledge, and skills. This conception of the human mind can be traced back to Aristotle
With the resurgence of machine learning in the 1980s, its rise to intellectual dominance in the 2000s, and its peak as an intellectual quasi-monopoly in AI in the late 2010s via
Deep Learning, a connectionist-inspired Tabula Rasa is increasingly becoming the dominant philosophical framework in which AI research is taking place. Many researchers are implicitly conceptualizing the mind via the metaphor of a “randomly initialized neural network” that starts blank and that derives its skills from “training data” – a cognitive fallacy that echoes early AI researchers a few decades prior who conceptualized the mind as a kind of mainframe computer equipped with clever subroutines. We see the world through the lens of the tools we are most familiar with.
Today, it is increasingly apparent that both of these views of the nature of human intelligence – either a collection of special-purpose programs or a general-purpose Tabula Rasa – are likely incorrect, which we discuss in II.1.3, along with implications for artificial intelligence.
I.3 AI evaluation: from measuring skills to measuring broad abilities
These two conceptualizations of intelligence – along with many other intermediate views combining elements from each side – have influenced a host of approaches for evaluating intelligence in machines, in humans, and more rarely in both at the same time, which we discuss below. Note that this document is not meant as an extensive survey of AI evaluation methods – for such a survey, we recommend
I.3.1 Skill-based, narrow AI evaluation
In apparent accordance with Minsky’s goal for AI, the major successes of the field have been in building special-purpose systems capable of handling narrow, well-described tasks, sometimes at above human-level performance. This success has been driven by performance measures quantifying the skill of a system at a given task (e.g. how well an AI plays chess, how well an image classifier recognizes cats from dogs). There is no single, formalized way to do skill-based evaluation. Historically successful approaches include:
-
Human review: having human judges observe the system’s input-output response and score it. This is the idea behind the Turing test and its variants. This evaluation mode is rarely used in practice, due to being expensive, impossible to automate, and subjective. Some human-facing AI systems (in particular commercial chatbots) use it as one of multiple evaluation mechanics.
-
White-box analysis: inspecting the implementation of the system to determine its input-output response and score it. This is most relevant for algorithms solving a fully-described task in a fully-described environment where all possible inputs can be explicitly enumerated or described analytically (e.g. an algorithm that solves the traveling salesman problem or that plays the game “Connect Four”), and would often take the form of an optimality proof.
-
Peer confrontation: having the system compete against either other AIs or humans. This is the preferred mode of evaluation for player-versus-player games, such as chess.
-
Benchmarks: having the system produce outputs for a “test set” of inputs (or environments) for which the desired outcome is known, and score the response.
Benchmarks in particular have been a major driver of progress in AI, because they are reproducible (the test set is fixed), fair (the test set is the same for everyone), scalable (it is inexpensive to run the evaluation many times), easy to set up, and flexible enough to be applicable to a wide range of possible tasks. Benchmarks have often been most impactful in the context of a competition between different research teams, such as the ILSVRC challenge for large-scale image recognition
These successes demonstrate the importance of setting clear goals and adopting objective measures of performance that are shared across the research community. However, optimizing for a single metric or set of metrics often leads to tradeoffs and shortcuts when it comes to everything that isn’t being measured and optimized for (a well-known effect on Kaggle, where winning models are often overly specialized for the specific benchmark they won and cannot be deployed on real-world versions of the underlying problem). In the case of AI, the focus on achieving task-specific performance while placing no conditions on how the system arrives at this performance has led to systems that, despite performing the target tasks well, largely do not feature the sort of human intelligence that the field of AI set out to build.
This has been interpreted by McCorduck as an “AI effect” where goalposts move every time progress in AI is made: “every time somebody figured out how to make a computer do something…play good checkers, solve simple but relatively informal problems…there was a chorus of critics to say, ‘that’s not thinking’ ”
involving skill-acquisition across a broad range of tasks. The “AI effect” characterization is confusing the process of intelligence (such as the intelligence displayed by researchers creating a chess-playing program) with the artifact produced by this process (the resulting chess-playing program), due to these two concepts being fundamentally intertwined in the case of humans. We discuss this further in II.1.
Task-specific performance is a perfectly appropriate and effective measure of success if and only if handling the task as initially specified is the end goal of the system — in other words, if our measure of performance captures exactly what we expect of the system. However, it is deficient if we need systems that can show autonomy in handling situations that the system creator did not plan for, that can dynamically adapt to changes in the task — or in the context of the task — without further human intervention, or that can be repurposed for other tasks. Meanwhile, robustness and flexibility are increasingly being perceived as important requirements for certain broader subfields of AI, such as L5 self-driving, domestic robotics, or personal assistants; there is even increasing interest in generality itself
I.3.2 The spectrum of generalization: robustness, flexibility, generality
Even though such machines might do some
things as well as we do them, or perhaps even
better, they would inevitably fail in others,
which would reveal they were acting not
through understanding, but only from the
disposition of their organs.
René Descartes, 1637
The resurgence of machine learning in the 1980s has led to an interest in formally defining, measuring, and maximizing generalization. Generalization is a concept that predates machine learning, originally developed to characterize how well a statistical model performs on inputs that were not part of its training data. In recent years, the success of Deep Learning
differ from previously encountered situations”.
The notion of “previously encountered situation” is somewhat ambiguous, so we should distinguish between two types of generalization:
- System-centric generalization: this is the ability of a learning system to handle situations it has not itself encountered before. The formal notion of generalization error in statistical learning theory would belong here.
- For instance, if an engineer develops a machine learning classification algorithm and fits it on a training set of
N samples, the “generalization” of this learning algorithm would refer to its classification error over images not part of the training set. - Note that the generalization power of this algorithm may be in part due to prior knowledge injected by the developer of the system. This prior knowledge is ignored by this measure of generalization.
- Developer-aware generalization: this is the ability of a system, either learning or static, to handle situations that neither the system nor the developer of the system have encountered before.
- For instance, if an engineer uses a “development set” of
N samples to create a static classification algorithm that uses hard-coded heuristic rules, the “generalization” of this static algorithm would refer to its classification error over images not part of the “development set”. - Note that “developer-aware generalization” is equivalent to “system-centric generalization” if we include the developer of the system as part of the system.
- Note that “developer-aware generalization” accounts for any prior knowledge that the developer of the system has injected into it. “System-centric generalization” does not.
- For instance, if an engineer develops a machine learning classification algorithm and fits it on a training set of
In addition, we find it useful to qualitatively define degrees of generalization for information-processing systems:
- Absence of generalization: The notion of generalization as we have informally defined above fundamentally relies on the related notions of novelty and uncertainty: a system can only generalize to novel information that could not be known in advance to either the system or its creator. AI systems in which there is no uncertainty do not display generalization. For instance, a program that plays tic-tac-toe via exhaustive iteration cannot be said to “generalize” to all board configurations. Likewise, a sorting algorithm that is proven to be correct cannot be said to “generalize” to all lists of integers, much like proven mathematical statements cannot be said to “generalize” to all objects that match the assumptions of their proof3.
-
Local generalization, or “robustness”: This is the ability of a system to handle new points from a known distribution for a single task or a well-scoped set of known tasks, given a sufficiently dense sampling of examples from the distribution (e.g. tolerance to anticipated perturbations within a fixed context). For instance, an image classifier that can distinguish previously unseen 150x150 RGB images containing cats from those containing dogs, after being trained on many such labeled images, can be said to perform local generalization. One could characterize it as “adaptation to known unknowns within a single task or well-defined set of tasks”. This is the form of generalization that machine learning has been concerned with from the 1950s up to this day.
-
Broad generalization, or “flexibility”: This is the ability of a system to handle a broad category of tasks and environments without further human intervention. This includes the ability to handle situations that could not have been foreseen by the creators of the system. This could be considered to reflect human-level ability in a single broad activity domain (e.g. household tasks, driving in the real world), and could be characterized as “adaptation to unknown unknowns across a broad category of related tasks”. For instance, a L5 self-driving vehicle, or a domestic robot capable of passing Wozniak’s coffee cup test (entering a random kitchen and making a cup of coffee)
[99] could be said to display broad generalization. Arguably, even the most advanced AI systems today do not belong in this category, although there is increasing research interest in achieving this level. -
Extreme generalization: This describes open-ended systems with the ability to handle entirely new tasks that only share abstract commonalities with previously encountered situations, applicable to any task and domain within a wide scope. This could be characterized as “adaptation to unknown unknowns across an unknown range of tasks and domains”. Biological forms of intelligence (humans and possibly other intelligent species) are the only example of such a system at this time. A version of extreme generalization that is of particular interest to us throughout this document is human-centric extreme generalization, which is the specific case where the scope considered is the space of tasks and domains that fit within the human experience. We will refer to “human-centric extreme generalization” as “generality”. Importantly, as we deliberately define generality here by using human cognition as a reference frame (which we discuss in II.1.2), it is only “general” in a limited sense. Do note, however, that humans display extreme generalization both in terms of system-centric generalization (quick adaptability to highly novel situations from little experience) and developer-aware generalization (ability of contemporary humans to handle situations that previous humans have never experienced during their evolutionary history).
To this list, we could, theoretically, add one more entry: “universality”, which would extend “generality” beyond the scope of task domains relevant to humans, to any task that could be practically tackled within our universe (note that this is different from “any task at all” as understood in the assumptions of the No Free Lunch theorem
Crucially, the history of AI has been one of slowly climbing up this spectrum, starting with systems that largely did not display generalization (symbolic AI), and evolving towards robust systems (machine learning) capable of local generalization. We are now entering a new stage, where we seek to create flexible systems capable of broad generalization (e.g. hybrid symbolic and machine learning systems such as self-driving vehicles, AI assistants, or cognitive developmental robots). Skill-focused task-specific evaluation has been appropriate for close-ended systems that aim at robustness in environments that only feature known unknowns, but developing systems that are capable of handling unknown unknowns requires evaluating their abilities in a general sense.
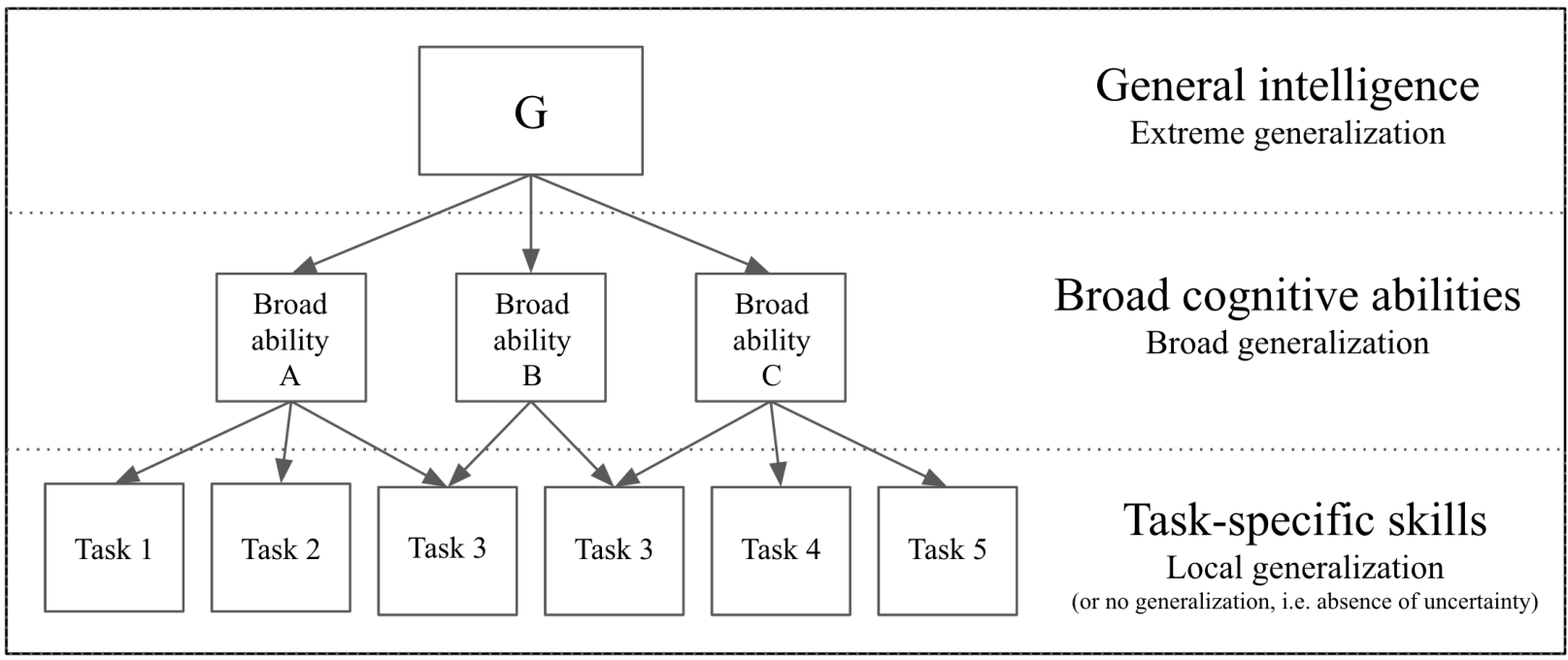
Importantly, the spectrum of generalization outlined above seems to mirror the organization of humans cognitive abilities as laid out by theories of the structure of intelligence in cognitive psychology. Major theories of the structure of human intelligence
Measuring such broad abilities (and possibly generality itself) rather than specific skills has historically been the problematic of the field of psychometrics. Could psychometrics inform the evaluation of abilities in AI systems?
Note that, in what follows:
- We use “broad abilities” to refer to cognitive abilities that lead to broad or extreme generalization. Developing such abilities should be the goal of any researcher inter
ested in flexible AI or general AI. “Broad abilities” is often meant in opposition to “local generalization”.
- We use “generalization” to refer to the entire spectrum of generalization, starting with local generalization.
- Because human general intelligence (the g factor) is itself a very broad cognitive ability (the top of the hierarchy of abilities), we use the term “intelligence” or “general intelligence” to refer to extreme generalization as defined above.
I.3.3 Measuring broad abilities and general intelligence: the psychometrics perspective
It seems to us that in intelligence there is a fundamental faculty, the alteration or the lack of which, is of the utmost importance for practical life. This faculty is […] the faculty of adapting one’s self to circumstances.
Alfred Binet, 1916
In the early days of the 20th century, Binet and Simon, looking for a formal way to distinguish children with mental disabilities from those with behavior problems, developed the Binet-Simon scale
A fundamental notion in psychometrics is that intelligence tests evaluate broad cognitive abilities as opposed to task-specific skills. Theories of the structure of intelligence
as cognitive abilities from psychometrics. Psychometrics approaches the quantification of abilities by using broad batteries of test tasks rather than any single task, and by analysing test results via probabilistic models. Importantly, the tasks should be previously unknown to the test-taker, i.e., we assume that test-takers do not practice for intelligence tests. This approach is highly relevant to AI evaluation.
Remarkably, in a parallel to psychometrics, there has been recent and increasing interest across the field of AI in using broad batteries of test tasks to evaluate systems that aim at greater flexibility. Examples include the Arcade Learning Environment for Reinforcement Learning agents
In addition to these multi-task benchmarks, a number of more ambitious test suites for cognitive abilities of AI have been proposed in the past but have not been implemented in practice: the Newell test by Anderson and Lebiere
I.3.4 Integrating AI evaluation and psychometrics
Besides efforts to broaden task-specific evaluation to batteries of multi-task tests, there have been more direct and explicit attempts to integrate AI evaluation and psychometrics. A first approach is to reuse existing psychometric intelligence tests, initially developed for humans, as a way to assess intelligence in AI systems – perhaps an obvious idea if we are to take the term “artificial intelligence” literally. This idea was first proposed by Green in 1964
called ANALOGY capable of solving a geometric analogy task of the kind that may be found in a pyschometric intelligence test.
An alternative, more promising approach is to leverage what psychometrics can teach us about ability assessment and test design to create new types of benchmarks targeted specifically at evaluating broad abilities in AI systems. Along these lines,
We argue that several important principles of psychometrics can inform intelligence evaluation in AI in the context of the development of broad AI and general AI:
- Measuring abilities (representative of broad generalization and skill-acquisition efficiency), not skills. Abilities are distinct from skills in that they induce broad generalization, i.e. they form the basis for skill across a broad range of tasks, including tasks that were previously unknown to the ability-enabled system and its developers.
- Doing so via batteries of tasks rather than any single task, that should be previously unknown to both the test taking system and the system developers (this is necessary to assess broad generalization as opposed to skill or local generalization).
- Having explicit standards regarding reliability, validity, standardization, and freedom from bias:
- Reliability implies that the test results for a given system should be reproducible over time and across research groups.
- Validity implies that what the test assesses should be clearly understood; test creators should be able to answer 1) what assumptions does the test make? 2) what does the test predict, i.e. what broad abilities would a successful result demonstrate, and how well does the test predict these abilities? (Which should ideally be achieved via statistical quantification.)
- Standardization implies adopting shared benchmarks across the subset of the research community that pursues broad AI and general AI. Standard benchmarks in computer vision and natural language processing have already shown to be highly effective catalyzers of progress.
- Freedom from bias implies that the test should not be biased against groups of test-takers in ways that run orthogonal to the abilities being assessed. For in
stance, a test of intelligence designed for both humans and AI should not leverage uniquely human acquired knowledge, or should not involve constraints unrelated to intelligence within which machines have unfair advantages (such as fast reaction times), etc.
Simultaneously, we argue that certain other aspects of psychometrics may be discarded in the development of new intelligence tests for AI:
- The exact number and taxonomy of cognitive abilities considered, being a subject of ongoing debate within cognitive psychology and being perhaps overly anthropocentric, should not be used as a strict template for artificial cognitive architectures and their evaluation. Existing taxonomies may at best serve as a source of inspiration.
- A number of abilities being assessed by psychometric intelligence tests are crystallized abilities (e.g. reading and writing), i.e. abilities that are acquired through experience, which are not clearly distinguishable from skills (they are effectively multi-purpose skills). We argue that AI tests that seek to assess flexibility and generality should not consider crystallized abilities, but rather, should focus on abilities that enable new skill acquisition. If a system possesses abilities that enable efficient skill acquisition in a domain, the system should have no issue in developing corresponding skills and crystallized abilities.
I.3.5 Current trends in broad AI evaluation
Despite a rising interest in building flexible systems, or even in generality itself, for the most part the AI community has not been paying much attention to psychometric evaluation, Psychometric AI, or Universal Psychometrics. If we are to assess the contemporary zeitgeist of broad AI evaluation, here is what we see.4
First, we note several positive developments. Since 2017, there is increasing awareness that one should seek to establish some form of generalization in evaluating Reinforcement Learning (RL) algorithms
Unfortunately, we must also note several negatives. The robustness of the systems being developed, in particular Deep Learning models, is often problematic
research findings is often an issue
Most importantly, the evaluation of any ability that goes decisively beyond local generalization is still largely a green field, and little effort has been devoted to investigate it.
Further, contemporary research “moonshots” that are publicly advertised as being steps towards general intelligence appear to still be focusing on skill-based task-specific evaluation for board games and video games (e.g. Go
We deplore this discrepancy between a focus on surpassing humans at tests of skill on one hand (while entirely disregarding whether the methods through which skill is achieved are generalizable), and a manifest interest in developing broad abilities on the other hand – an endeavour entirely orthogonal to skill itself. We hypothesize that this discrepancy is due to a lack of a clear conceptualization of intelligence, skill, and generalization, as well as a lack of appropriate measures and benchmarks for broad cognitive abilities. In what follows, we expose in more detail the issue with using task-specific “moonshots” (e.g. achieving better-than-human performance in a video game or board game) as stepping stones towards more general forms of AI, and we propose a formal definition of intelligence meant to be actionable in the pursuit of flexible AI and general AI.
II A new perspective
II.1 Critical assessment
II.1.1 Measuring the right thing: evaluating skill alone does not move us forward
In 1973, psychologist and computer science pioneer Allen Newell, worried that recent advances in cognitive psychology were not bringing the field any closer to a holistic theory of cognition, published his seminal paper You can’t play 20 questions with nature and win
It may be obvious from a modern perspective that a static chess-playing program based on minimax and tree search would not be informative about human intelligence, nor competitive with humans in anything other than chess. But it was not obvious in the 1970s, when chess-playing was thought by many to capture, and require, the entire scope of rational human thought. Perhaps less obvious in 2019 is that efforts to “solve” complex video games using modern machine learning methods still follow the same pattern. Newell wrote
Optimizing for single-purpose performance is useful and valid if one’s measure of success can capture exactly what one seeks (as we outlined in I.3.1), e.g. if one’s end goal is a chess-playing machine and nothing more. But from the moment the objective is settled, the process of developing a solution will be prone to taking all shortcuts available to satisfy the objective of choice – whether this process is gradient descent or human-driven research. These shortcuts often come with undesirable side-effects when it comes to considerations not incorporated the measure of performance. If the environment in which the system is to operate is too unpredictable for an all-encompassing objective function to be defined beforehand (e.g. most real-world applications of robotics, where systems face unknown
unknowns), or if one aims at a general-purpose AI that could be applied to a wide range of problems with no or little human engineering, then one must somehow optimize directly for flexibility and generality, rather than solely for performance on any specific task.
This is, perhaps, a widely-accepted view today when it comes to static programs that hard-code a human-designed solution. When a human engineer implements a chatbot by specifying answers for each possible query via if/else statements, we do not assume this chatbot to be intelligent, and we do not expect it to generalize beyond the engineer’s specifications. Likewise, if an engineer looks at a specific IQ test task, comes up with a solution, and write down this solution in program form, we do not expect the program to generalize to new tasks, and we do not believe that the program displays intelligence — the only intelligence at work here is the engineer’s. The program merely encodes the crystallized output of the engineer’s thought process — it is this process, not its output, that implements intelligence. Intelligence is not demonstrated by the performance of the output program (a skill), but by the fact that the same process can be applied to a vast range of previously unknown problems (a general-purpose ability): the engineer’s mind is capable of extreme generalization. Since the resulting program is merely encoding the output of that process, it is no more intelligent than the ink and paper used to write down the proof of a theorem.
However, what of a program that is not hard-coded by humans, but trained from data to perform a task? A learning machine certainly may be intelligent: learning is a necessary condition to adapt to new information and acquire new skills. But being programmed through exposure to data is no guarantee of generalization or intelligence. Hard-coding prior knowledge into an AI is not the only way to artificially “buy” performance on the target task without inducing any generalization power. There is another way: adding more training data, which can augment skill in a specific vertical or task without affecting generalization whatsoever.
Information processing systems form a spectrum between two extremes: on one end, static systems that consist entirely of hard-coded priors (such as DeepBlue or our if/else chatbot example), and on the opposite end, systems that incorporate very few priors and are almost entirely programmed via exposure to data (such as a hashtable or a densely-connected neural network). Most intelligent systems, including humans and animals, combine ample amounts of both priors and experience, as we point out in
This can be readily demonstrated with a simple example: consider a hashtable that uses a locality-sensitive hash function (e.g. nearest neighbor) to map new inputs to previously seen inputs. Such a system implements a learning algorithm capable of local generalization, the extent of which is fixed (independent of the amount of data seen), determined only by the abstraction capabilities of the hash function. This system, despite only featuring trace amounts of generalization power, is already sufficient to “solve” any task for which
unlimited training data can be generated, such as any video game. All that one has to do is obtain a dense sampling of the space of situations that needs to be covered, and associate each situation with an appropriate action vector.
Adding ever more data to a local-generalization learning system is certainly a fair strategy if one’s end goal is skill on the task considered, but it will not lead to generalization beyond the data the system has seen (the resulting system is still very brittle, e.g. Deep Learning models such as OpenAI Five), and crucially, developing such systems does not teach us anything about achieving flexibility and generality. “Solving” any given task with beyond-human level performance by leveraging either unlimited priors or unlimited data does not bring us any closer to broad AI or general AI, whether the task is chess, football, or any e-sport.
Current evidence
In summary, the hallmark of broad abilities (including general intelligence, as per II.1.2) is the power to adapt to change, acquire skills, and solve previously unseen problems — not skill itself, which is merely the crystallized output of the process of intelligence. Testing for skill at a task that is known in advance to system developers (as is the current trend in general AI research) can be gamed without displaying intelligence, in two ways: 1) unlimited prior knowledge, 2) unlimited training data. To actually assess broad abilities, and thus make progress toward flexible AI and eventually general AI, it is imperative that we control for priors, experience, and generalization difficulty in our evaluation methods, in a rigorous and quantitative way.
II.1.2 The meaning of generality: grounding the g factor
It is a well-known fact of cognitive psychology that different individuals demonstrate different cognitive abilities to varying degrees, albeit results across all tests of intelligence
are correlated. This points to cognition being a multi-dimensional object, structured in a hierarchical fashion
The No Free Lunch theorem
This is a question that is largely irrelevant for psychometrics, because as a subfield of psychology, it makes the implicit assumption that it is concerned solely with humans and the human experience. But this question is highly relevant when it comes to AI: if there is such a thing as universal intelligence, and if human intelligence is an implementation of it, then this algorithm of universal intelligence should be the end goal of our field, and reverse-engineering the human brain could be the shortest path to reach it. It would make our field close-ended: a riddle to be solved. If, on the other hand, human intelligence is a broad but ad-hoc cognitive ability that generalizes to human-relevant tasks but not much else, this implies that AI is an open-ended, fundamentally anthropocentric pursuit, tied to a specific scope of applicability. This has implications for how we should measure it (by using human intelligence and human tasks as a reference) and for the research strategies we should follow to achieve it.
The g factor, by definition, represents the single cognitive ability common to success across all intelligence tests, emerging from applying factor analysis to test results across a diversity of tests and individuals. But intelligence tests, by construction, only encompass tasks that humans can perform — tasks that are immediately recognizable and understandable by humans (anthropocentric bias), since including tasks that humans couldn’t perform would be pointless. Further, psychometrics establishes measurement validity by demonstrating predictiveness with regard to activities that humans value (e.g. scholastic success): the very idea of a “valid” measure of intelligence only makes sense within the frame of reference of human values.
In fact, the interpretation of what specific abilities make someone “intelligent” vary from culture to culture
(such as octopus camouflage) are not perceived as intelligent. This observation extends to collective entities (e.g. markets, companies, Science as an institution) and natural processes (e.g. biological evolution). Although they can be modeled as standalone systems whose abilities and behavior match broadly accepted definitions of intelligence (achieving goals across a wide range of environments, demonstrating flexibility and adaptability, etc.), we do not categorize these systems as intelligent, simply because they aren’t sufficiently human-like.
To use a well-known cross-domain analogy
But would this mean that human morphology and motor affordances are “general” in an absolute sense, and that a very fit person could handle any physical task at all? Certainly not; we are not adapted for the large majority of environments that can be found in the universe — from the Earth’s oceans to the surface of Venus, from the atmosphere of Jupiter to interstellar space. It is, however, striking and remarkable that human physical abilities generalize to a far greater range of environments and tasks than the limited set of environments and activities that guided their evolution. To caricature, human bodies evolved for running in the East-African savanna, yet they are capable of climbing mount Everest, swimming across lakes, skydiving, playing basketball, etc. This is not a coincidence; by necessity, evolution optimizes for adaptability, whether cognitive adaptability or sensorimotor adaptability. Human physical capabilities can thus be said to be “general”, but only in a limited sense; when taking a broader view, humans reveal themselves to be extremely specialized, which is to be expected given the process through which they evolved.
We argue that human cognition follows strictly the same pattern as human physical capabilities: both emerged as evolutionary solutions to specific problems in specific environments (commonly known as “the four Fs”). Both were, importantly, optimized for adaptability, and as a result they turn out to be applicable for a surprisingly greater range of tasks and environments beyond those that guided their evolution (e.g. piano-playing, solving linear algebra problems, or swimming across the Channel) — a remarkable fact that should be of the utmost interest to anyone interested in engineering broad or general-purpose abilities of any kind. Both are multi-dimensional concepts that can be modeled as
a hierarchy of broad abilities leading up to a “general” factor at the top. And crucially, both are still ultimately highly specialized (which should be unsurprising given the context of their development): much like human bodies are unfit for the quasi-totality of the universe by volume, human intellect is not adapted for the large majority of conceivable tasks.
This includes obvious categories of problems such as those requiring long-term planning beyond a few years, or requiring large working memory (e.g. multiplying 10-digit numbers). This also includes problems for which our innate cognitive priors are unadapted; for instance, humans can be highly efficient in solving certain NP-hard problems of small size when these problems present cognitive overlap with evolutionarily familiar tasks such as navigation (e.g. the Euclidean Traveling Salesman Problem (TSP) with low point count can be solved by humans near-optimally in near-linear optimal time
A particularly marked human bias is dimensional bias: humans show excellent performance on 2D navigation tasks and 2D shape-packing puzzles, and can still handle 3D cases albeit with greatly reduced performance, but they are effectively unable to handle 4D and higher. This fact is perhaps unsurprising given human reliance on perceptual strategies for problem-solving – strategies which are backed by neural mechanisms specifically evolved for 2D navigation (hippocampal systems of place cells and grid cells
Thus, a central point of this document is that “general intelligence” is not a binary property which a system either possesses or lacks. It is a spectrum, tied to 1) a scope of application, which may be more or less broad, and 2) the degree of efficiency with which the system translate its priors and experience into new skills over the scope considered, 3) the degree of generalization difficulty represented by different points in the scope considered (see II.2). In addition, the “value” of one scope of application over another is entirely subjective; we wouldn’t be interested in (and wouldn’t even perceive as intelligent) a system whose scope of application had no intersection with our own.
As such, it is conceptually unsound to set “artificial general intelligence” in an absolute sense (i.e. “universal intelligence”) as a goal. To set out to build broad abilities of any kind, one must start from a target scope, and one must seek to achieve a well-defined intelligence threshold within this scope: AI is a deeply contextual and open-ended endeavour, not a single one-time riddle to be solved. However, it may in theory be possible to create human-like artificial intelligence: we may gradually build systems that extend across the same scope of applicability as human intelligence, and we may gradually increase their generalization power within this scope until it matches that of humans. We may even build systems with higher generalization power (as there is no a priori reason to assume human cognitive ef-
ficiency is an upper bound), or systems with a broader scope of application. Such systems would feature intelligence beyond that of humans.
In conclusion, we propose that research on developing broad in AI systems (up to “general” AI, i.e. AI with a degree of generality comparable to human intelligence) should focus on defining, measuring, and developing a specifically human-like form of intelligence, and should benchmark progress specifically against human intelligence (which is itself highly specialized). This isn’t because we believe that intelligence that greatly differs from our own couldn’t exist or wouldn’t have value; rather, we recognize that characterizing and measuring intelligence is a process that must be tied to a well-defined scope of application, and at this time, the space of human-relevant tasks is the only scope that we can meaningfully approach and assess. We thus disagree with the perspective of Universal Psychometrics
II.1.3 Separating the innate from the acquired: insights from developmental psychology
Advances in developmental psychology teach us that neither of the two opposing views of the nature of the mind described in
These priors are not a limitation to our generalization capabilities; to the contrary, they are their source, the reason why humans are capable of acquiring certain categories of skills with remarkable efficiency. The central message of the No Free Lunch theorem
We noted in
Human cognitive priors come in multiple forms, in particular7:
- Low-level priors about the structure of our own sensorimotor space, e.g. reflexes such as the vestibulo-ocular reflex, the palmar grasp reflex, etc. These priors enable infants (including prior to birth) to quickly take control of their senses and bodies, and may even generate simple behaviors in a limited range of situations.
- Meta-learning priors governing our learning strategies and capabilities for knowledge acquisition. This may include, for instance, the assumption that information in the universe follows a modular-hierarchical structure, as well as assumptions regarding causality and spatio-temporal continuity.
- High-level knowledge priors regarding objects and phenomena in our external environment. This may include prior knowledge of visual objectness (what defines an object), priors about orientation and navigation in 2D and 3D Euclidean spaces, goal-directedness (expectation that our environment includes agents that behave according to goals), innate notions about natural numbers, innate social intuition (e.g. theory of mind), etc.
When it comes to creating artificial human-like intelligence, low-level sensorimotor priors are too specific to be of interest (unless one seeks to build an artificial human body). While human meta-learning priors should be of the utmost interest (understanding the strategies that the brain follows to turn experience into knowledge and skills is effectively our end goal), these priors are not relevant to evaluating intelligence: they are intelligence, rather than a third-party modulating factor to be controlled for. They are part of the black box that we seek to characterize.
It is knowledge priors that should be accounted for when measuring a human-like form of intelligence. A system that does not possess human innate knowledge priors would be at a critical disadvantage compared to humans when it comes to efficiently turning a given experience curriculum into skill at a given human task. Inversely, a system that has access to more extensive hard-coded knowledge about the task at hand could not be fairly compared to human intelligence – as we noted in II.1.1, unlimited priors allow system developers to “buy” unbounded performance on any given task, with no implications with regard to generalization abilities (what we are actually trying to achieve).
Therefore, we propose that an actionable test of human-like general intelligence should be founded on innate human knowledge priors:
- The priors should be made as close as possible to innate human knowledge priors as we understand them. As our understanding of human knowledge priors improves over time, so should the test evolve.
- The test should assume that the system being measured possesses a specific set of priors. AI systems with more extensive priors should not be benchmarked using such a test. AI systems with fewer priors should be understood to be at a disadvantage.
learning priors and knowledge priors is subjective since knowledge facilitates skill acquisition: for instance, the neural mechanism behind our capabilities to perform 2D navigation may be treated either as a specialized meta-learning prior or as a knowledge prior about the external world.
- The priors assumed by the test should be explicitly and exhaustively described. Im-portantly, current psychometric intelligence tests make many assumptions about prior knowledge held by the test-taker (either innate or acquired), but never explicitly describe these assumptions.
- To make sure that humans test-takers do not bring further priors to the test, the test tasks should not rely on any acquired human knowledge (i.e. any knowledge beyond innate prior knowledge). For instance, they should not rely on language or learned symbols (e.g. arrows), on acquired concepts such as “cat” or “dog”, or on tasks for which humans may have trained before (e.g. chess).
This leads us to a central question: what is the exact list of knowledge priors that humans are born with? This is the question that the developmental science theory of Core Knowledge
- Objectness and elementary physics: humans assume that their environment should be parsed into “objects” characterized by principles of cohesion (objects move as continuous, connected, bounded wholes), persistence (objects do not suddenly cease to exist and do not suddenly materialize), and contact (objects do not act at a distance and cannot interpenetrate).
- Agentness and goal-directedness: humans assume that, while some objects in their environment are inanimate, some other objects are “agents”, possessing intentions of their own, acting so as to achieve goals (e.g. if we witness an object A following another moving object B, we may infer that A is pursuing B and that B is fleeing A), and showing efficiency in their goal-directed actions. We expect that these agents may act contingently and reciprocally.
- Natural numbers and elementary arithmetic: humans possess innate, abstract number representations for small numbers, which can be applied to entities observed through any sensory modality. These number representations may be added or subtracted, and may be compared to each other, or sorted.
- Elementary geometry and topology: this core knowledge system captures notions of distance, orientation, in/out relationships for objects in our environment and for ourselves. It underlies humans’ innate facility for orienting themselves with respect to their surroundings and navigating 2D and 3D environments.
While cognitive developmental psychology has not yet determined with a high degree of certainty the exact set of innate priors that humans possess, we consider the Core Knowledge theory to offer a credible foundation suitable to the needs of a test of human-like general intelligence. We therefore propose that an actionable test of general intelligence that would be fair for both humans and machines should only feature tasks that assume the four core knowledge systems listed above, and should not involve any acquired knowledge outside of these priors. We also argue, in agreement with
II.2 Defining intelligence: a formal synthesis
II.2.1 Intelligence as skill-acquisition efficiency
So far, we have introduced the following informally-described intuitions:
- Intelligence lies in broad or general-purpose abilities; it is marked by flexibility and adaptability (i.e. skill-acquisition and generalization), rather than skill itself. The history of AI has been a slow climb along the spectrum of generalization.
- A measure of intelligence should imperatively control for experience and priors, and should seek to quantify generalization strength, since unlimited priors or experience can produce systems with little-to-no generalization power (or intelligence) that exhibit high skill at any number of tasks.
- Intelligence and its measure are inherently tied to a scope of application. As such, general AI should be benchmarked against human intelligence and should be founded on a similar set of knowledge priors.
Let us now formalize these intuitions. In what follows, we provide a series of definitions for key concepts necessary to ground a formal definition of intelligence and its measure. We will leverage the tools of Algorithmic Information Theory. These definitions lead up to a formal way of expressing the following central idea:
The intelligence of a system is a measure of its skill-acquisition efficiency over a scope of tasks, with respect to priors, experience, and generalization difficulty.
Intuitively, if you consider two systems that start from a similar set of knowledge priors, and that go through a similar amount of experience (e.g. practice time) with respect to a set of tasks not known in advance, the system with higher intelligence is the one that ends up with greater skills (i.e. the one that has turned its priors and experience into skill more efficiently). This definition of intelligence encompasses meta-learning priors, memory, and fluid intelligence. It is distinct from skill itself: skill is merely the output of the process of intelligence.
Before we start, let us emphasize that many possible definitions of intelligence may be valid, across many different contexts, and we do not purport that the definition above and the formalism below represent the “one true” definition. Nor is our definition meant
to achieve broad consensus. Rather, the purpose of our definition is to be actionable, to serve as a useful perspective shift for research on broad cognitive abilities, and to function as a quantitative foundation for new general intelligence benchmarks, such as the one we propose in part III. As per George Box’s aphorism, “all models are wrong, but some are useful”: our only aim here is to provide a useful North Star towards flexible and general AI. We discuss in II.2.3 the concrete ways in which our formalism is useful and actionable.
Position of the problem
First, we must introduce basic definitions to establish our problem setup. It should be immediately clear to the reader that our choice of problem setup is sufficient to model Fully-Supervised Learning, Partially-Supervised Learning, and Reinforcement Learning.
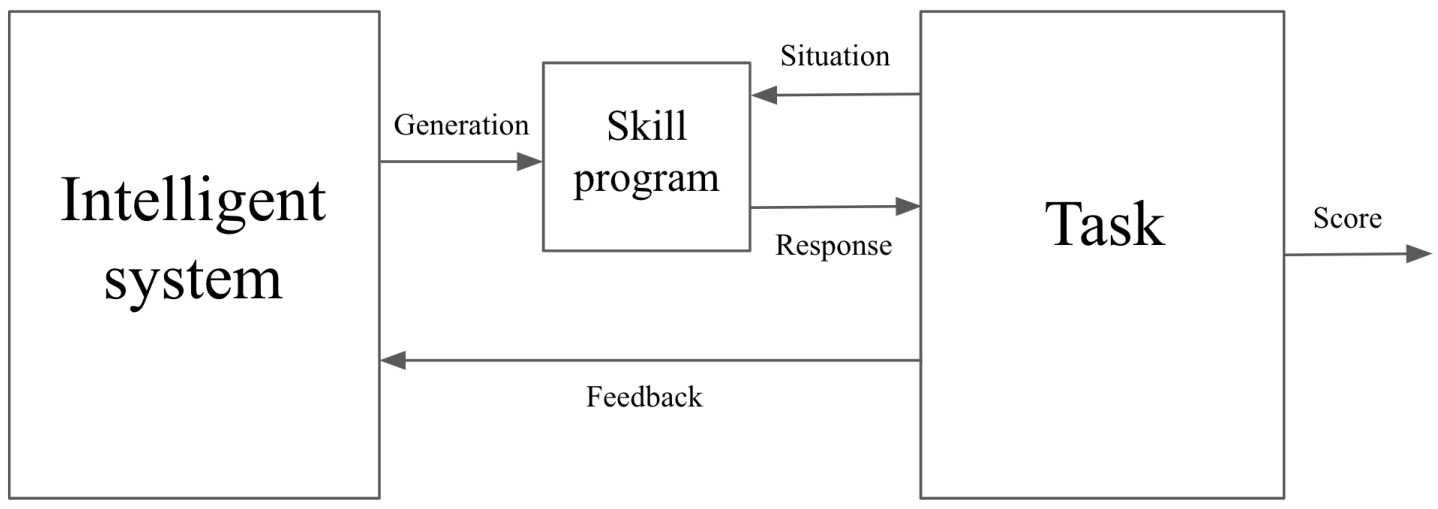
We consider the interaction between a “task” and an “intelligent system”. This interaction is mediated by a “skill program” (generated by the intelligent system) and a “scoring function” (part of the task).
We implicitly consider the existence of a fixed universal Turing machine on which our programs run (including the skill programs, as well as programs part of the task and part of the intelligent system). We also assume the existence of a fixed “situation space” and “response space” . Each of these spaces defines the set of binary strings that are allowed as input (and output, respectively) of all skill programs we will consider henceforth. They may be, for instance, the sensor space and the motor space of an animal or robot.
A task
-
A task state
Task State (binary string). -
A “situation generation” function
Situation Gen, mapping Task State to Situation . It may be stochastic.- A is a binary string belonging to .
-
A “scoring function”
Scoring, which maps a Situation, Response, and Task State to a Score and Feedback . It may be stochastic.- A
Response is a binary string belonging toResponse Space . - A “score”
Score is a scalar. It is meant to measure the appropriateness of a response to a situation. - A piece of “feedback”
Feedback is a binary string. It may encode full or partial information about the current score, or about scores corresponding to past responses (which may be known to the task state). - Note: The parameter
Situation is technically optional since it may be known to the task state at runtime – we include it here for maximum explicitness. - A self-update function
Task Update, which maps a Response and Task State to a new Task State , which mutates the task state based on the response to the latest situation. It may be stochastic.
- A
For instance, a game such as chess or WarCraft III (as well as what we call “task” in the ARC benchmark presented in
An intelligent system
- A system state
I S State (binary string). - A “skill program generation function”:
Skill Program Gen, which maps I S State to a Skill Program and S P State .
It may be stochastic.- A skill program
Skill Program, which maps a Situation and S P State to a Response and S P State is a function that maps an input situation to a valid response (part ofResponse Space ), potentially using some working memory (S P State ). It may be stochastic. Because it possesses a stateS P State (a binary string), it may be used to autonomously handle a series of connected situations without further communication with the intelligent system that generated it. - A skill program may be, for instance, any game-specific program capable of playing new levels in a given video game.
- In what follows, we refer to “skill program” as the combination of the
Skill Program function and the initial skill program stateS P State (i.e. skill programs are considered stateful). - A skill program represents a frozen version of the system’s task-specific capabilities (including the ability to adapt to novel situations within the task). We use the concept of skill program as a conceptual device to formalize the level of task-specific skill and task-specific generalization capabilities of an agent at a given point in time.
- A skill program
- A self-update function
I S Update, from situation, response, feedback, and I S state to I S state , which mutates the system’s state based on the latest situation and corresponding feedback. It may be stochastic.
For instance, a neural network generation and training algorithm for games would be an “intelligent system”, and the inference-mode game-specific network it would output at the end of a training run on one game would be a “skill program”. A program synthesis engine capable of looking at an ARC task and outputting a solution program would be an “intelligent system”, and the resulting solution program capable of handling future input grids for this task would be a “skill program”.
The interaction between task, intelligent system, and skill programs is structured in two phases: a training phase and an evaluation phase. The goal of the training phase is for the
The training phase consists of the repetition of the following steps (we note the current step as
- We generate a training situation:
situation t is generated from the training task state at time t - The
I S generates a new skill program (without knowledge of the current situation):
skill program t and skill program state t are generated from the I S state at time t - Implicitly, we assume that the “goal” of the
I S is to generate highly-skilled programs, i.e. programs that would have performed well on past situations, that will perform well on the next situation, and that would perform well on any possible situation for this task (in particular evaluation situations, which may feature significant novelty and uncertainty). We do not attempt to model why theI S should pursue this goal. s p state t represents the working memory of the skill program at timet . Note that, because the skill program is generated anew with each training step, statefulness across situations viaS P state is not actually required during training. However, statefulness is important during evaluation when handling tasks that require maintaining information across situations. Note that in many games or real-world tasks, situations are all independent and thus skill programs don’t require statefulness at all (e.g. ARC, or any fully-observable game, like chess).
- Implicitly, we assume that the “goal” of the
- The skill program outputs a response to the situation:
response t and the next skill program state are generated by the skill program using the current situation and state skill program t is only called once, ands p state t plus one is discarded, since the skill program is generated anew by the intelligent system at each training step.- In practice, in partially-observable games where consecutive situations are very close to each other (e.g. two consecutive screen frames in WarCraft III), one
may assume that
- The task scoring function assigns a score to the response and generates a piece of feedback:
- Note: The scalar score is meant to encode how appropriate the response is, and the feedback data is meant to be used by the intelligent system to update its state. In simple cases (e.g. fully-supervised learning), the feedback data is the same as the scalar score, meaning that the intelligent agent would have complete and immediate information about the appropriateness of its response. In other cases, the feedback data may only contain partial information, no information, or information that is only relevant to responses generated for prior situations (delayed feedback).
- The
intelligent system updates its internal state based on the feedback received from the task: - The task updates its internal state based on the response received to the situation:
The training phase ends at the discretion of the function (e.g. returns a “STOP” situation), at which time would generate its last skill program, including an initial state (initial working memory) meant to perform well during evaluation (e.g. blank).
The evaluation phase is superficially similar to the training phase, with the differences that 1) the task starts from
Like the separation between skill program and intelligent system, the evaluation phase should be understood as a conceptual device used to quantify the task-specific skill and task-specific generalization capabilities demonstrated by a system at a given point in time. The evaluation phase should not be seen as being conceptually similar to a child taking a school test or an IQ test. In real-world evaluation situations, evaluation involves the entire intelligent system, dynamically adapting its understanding of the task at hand. A real-world evaluation situation would be represented in our formalism as being part of the training curriculum – a series of training situations with blank feedback.
The evaluation phase consists of the repetition of the following steps (the current step is noted
- We generate a test situation:
situation_e ← SituationGen(testTaskState_e) - The skill program considered produces a response:
[response_e, testSPState_{e+1}] ← testSkillProgram(situation_e, testSPState_e)- Note that the update of the skill program state enables the skill program to maintain a working memory throughout the evaluation phase. This is useful for partially-observable games. This is irrelevant to many games (including ARC) and many real-world tasks, where skill programs would be stateless.
- The task scoring function assigns a score to the response (the feedback is discarded):
score_e ← Scoring(Situation_e, response_e, testTaskState_e) - The task updates its internal state based on the response received:
testTaskState_{e+1} ← TaskUpdate(response_e, testTaskState_e)
The evaluation phase also ends at the discretion of the SituationGen function.
Note that for the sake of simplification, we consider that the ‘s
Based on the setup described thus far, we can define the following useful concepts:
-
Evaluation result: Sum of the scalar scores obtained by a fixed skill program over a specific evaluation phase instance for a task. Since all objects involved (skill program, situation generation program, task update program, initial task state) may be stochastic, this quantity may also be stochastic. Likewise, we define training-time performance as the sum of the scalar scores obtained during a given training phase. Training-time performance is tied to a specific sequence of training situations.
-
Skill: Probabilistic average of evaluation results over all possible evaluation phase instances, i.e. average of per-evaluation sum of scores obtained after running the evaluation phase infinitely many times. Skill is a property of a skill program. Note that other distributional reduction functions could be used, such as median or minimum.
-
Optimal skill: Maximum skill theoretically achievable by the best possible skill program on the task. It is a property of a task.
-
Sufficient skill threshold, noted
theta sub T : Subjective threshold of skill associated with a task, above which a skill program can be said to “solve” the task. It is a property of a task. -
Task and skill value function: We define a value function over task space (note that task space may be infinite), associating a scalar value to the combination of a task and a threshold of skill
theta for the task :TaskValue of Task and theta, which maps to omega T theta . Values are assumed positive or zero, and is assumed monotonous as a function oftheta (for a given task, higher skill always has higher value). This value function captures the relative importance of skill at each task and defines the subjective frame of reference of our intelligence definition (for instance, if we wish to evaluate human-like intelligence, we would place high value on achieving high skill at human-relevant tasks and place no value on tasks that are irrelevant to the human experience). The valueomega T theta of a skill level at a task is chosen so that the quantityomega T theta can be compared fairly across different tasks (i.e. it should capture the value we place on achieving skilltheta at taskT ). This enables us to homogeneously aggregate skill across different tasks without worrying about the scale of the their respective scoring functions. -
Task value, noted
omega T : This is the value of achieving sufficient skill level atT , i.e.omega T equals omega T theta sub T . -
Optimal solution: Any skill program that can achieve optimal skill on a task. Likewise we define a training-time optimal solution as any skill program that can achieve optimal training-time performance over a specific sequence of training situations.
-
Sufficient solution: Any skill program that can achieve sufficient skill
theta T on a task. -
Curriculum: Sequence of interactions (situations, responses, and feedback) between a task and an intelligent system over a training phase. For a given task and intelligent system, there exists a space of curricula, parameterized by the stochastic components of the underlying programs. A curriculum emerges from the interaction between the system and a task: this can model both teaching and active learning.
-
Optimal curriculum: curriculum which leads an intelligent system to produce the best (highest skill) skill program it can generate for this task. It is specific to a task and an intelligent system. There may be more than one optimal curriculum.
-
Sufficient curriculum: curriculum which leads an intelligent system to a sufficient solution. It is specific to a task and an intelligent system. There may be more than one sufficient curriculum.
-
Task-specific potential, noted
theta max of T and I S : Skill of the best possible skill program that can be generated by a given intelligent system on a task (after an optimal curriculum). It is a scalar value specific to a task and an intelligent system. -
Intelligent system scope: Subspace of task space including all tasks for which task value
omega T is non-zero and for which the intelligent system is capable of producing a sufficient solution after a training phase. This space may be infinite. “To be capable of producing a sufficient solution” means that there exists a sufficient curriculum for the intelligent system and task considered. A scope is a property of an intelligent system. -
Intelligent system potential: Set of task-specific potential values over all tasks in the system’s scope. Potential is a property of an intelligent system.
We find that in most cases it is more useful to consider sufficient skill and sufficient solutions rather than optimal skill and optimal solutions – in application settings, we seek to achieve sufficient performance using as little resources as possible; it is rarer and less practical to seek to achieve maximum possible performance using unlimited resources.
Quantifying generalization difficulty, experience, and priors using Algorithmic Information Theory
Algorithmic Information Theory (AIT) may be seen as a computer science extension of Information Theory. AIT concerns itself with formalizing useful computer science intuitions regarding complexity, randomness, information, and computation. Central to AIT is the notion of Algorithmic Complexity. Algorithmic Complexity (also known as Kolmogorov Complexity or Algorithmic Entropy) was independently investigated, in different contexts, by
Much like the concept of Entropy in Information Theory, Algorithmic Complexity is a measure of the “information content” of mathematical objects. For our own needs, we will only consider the specific case of binary strings. Indeed, all objects we have introduced so far have been either scalar values (score, potential), or binary strings (states, programs, situations, and responses), since any program may be represented as a binary string.
The Algorithmic Complexity (noted
We can use Algorithmic Complexity to define the information content that a string
Because any program may be represented as a binary string, we can use Relative Algorithmic Complexity to describe how closely related two programs are. Based on this observation, we propose to define the intuitive notion of “Generalization Difficulty” of a task as follows:
Consider:
- A task
T , Sol T theta , the shortest of all possible solutions ofT of thresholdtheta (shortest skill program that achieves at least skilltheta during evaluation),Train Sol T C opt , the shortest optimal training-time solution given a curriculum (shortest skill program that achieves optimal training-time performance over the situations in the curriculum).
We then define Generalization Difficulty as:
Generalization Difficulty of a task given a curriculum
Thus, a task with high “generalization difficulty” is one where the evaluation-time behavior needs to differ significantly from the simplest possible optimal training-time behavior in order to achieve sufficient skill. Relative Algorithmic Complexity provides us with a metric to quantify this difference:
Note that this definition of generalization difficulty may seem counter-intuitive. Occam’s razor principle would seem to suggest that the simplest program that works on the training situations should also be a program that generalizes well. However, generalization describes the capability to deal with future uncertainty, not the capability to compress the behavior that would have been optimal in the past — being prepared for future uncertainty has a cost, which is antagonistic to policy compression9. By necessity,
Another way to express the same idea is that generalization requires to reinterpret the
task when new data arrives (e.g. at evaluation time). This implies the need to store representations of past data that would be seemingly useless from the perspective of the past but may prove useful in the future. For example, consider the following labeled points along a line:
Importantly, this first definition of generalization difficulty only captures system-centric generalization, as it quantifies the difficulty of handling evaluation situations that differ from training situations regardless of the system’s preexisting capabilities. To capture developer-aware generalization, we need to take into account the system in its initial state at the start of training,
Developer-aware Generalization Difficulty of a task for an intelligent system given a curriculum and a skill threshold , noted
In which we note:
Developer-aware generalization thus represents the amount of uncertainty about the shortest evaluation-time solution given that you have at your disposal both the initial system and the shortest training-time solution, i.e. the amount of modifications you would have to make to the shortest training-time solution to obtain the evaluation-time solution, provided that these edits can make use of the contents of the initial system.
Likewise, we can define the Generalization Difficulty from task to task (sufficient case) as
Next, we can also use Relative Algorithmic Complexity to formally quantify the Priors
Priors of an intelligent system relative to a task
Fraction of the Algorithmic Complexity of the shortest solution of
“Priors” thus defined can be interpreted as a measure of how close from a sufficient or optimal solution the system starts, i.e. the “amount of relevant information” embedded in the initial system. Note that this is different from the “amount of information” embedded in the initial system (which would merely be the Algorithmic Complexity of the initial system). As such, our measure only minimally penalizes large systems that contain prior knowledge that is irrelevant to the task at hand (the only added cost is due to knowledge indexing and retrieval overhead).
Further, we can use Relative Algorithmic Complexity to define the Experience
Consider a single step
- At
t , the system receives some new data in the form of the binary strings , , and (although may be omitted since, being the output of a skill program previously generated by theI S , it can be assumed to be known by theI S as soon as is known). - Only some of this data is relevant to solving the task (the data may be noisy or otherwise uninformative).
- Only some of the data contains novel information for the intelligent system (situations and responses may be repetitive, and the intelligent system may be a slow learner that needs information to be repeated multiple times or presented in multiple ways). Note that we use the term “novel” to characterize information that would appear novel to the system, rather than information that has never appeared before in the curriculum (the difference between the two lies in the system’s learning efficiency).
We informally define the amount of experience accrued at step
uncertainty reduction about the solution that is made available by the task in the current
situation data and feedback data (i.e. how much the
the solution using the step data if it were optimally intelligent).
Formally:
Experience accrued at step
In which we note:
I S sub t equals Skill Program Gen, I S Update, and i s State sub t data sub t equals Situation sub t, response sub t, and feedback sub t
By summing over all steps, we obtain the following definition of total experience (note that
we normalize by the Algorithmic Complexity of the solution considered, as we did for pri-
ors):
Experience
“Experience” thus defined can be interpreted as a measure of the amount of relevant in-
formation received by the system about the task over the course of a curriculum, only
accounting for novel information at each step.
Because this is different from the “amount of information” contained in the curriculum
(i.e. the Algorithmic Complexity of the curriculum), our measure does not penalize systems
that go through noisy curricula.
In addition, because we use an eager sum of relevant and novel information at each step
instead of globally pooling the information content of the curriculum, we penalize learners
that are slower to absorb the relevant information that is presented to them.
Lastly, because our sum is different from “amount of relevant information (novel or not)
at each step summed over all steps”, we do not penalize systems that go through repetitive
curricula. If a fast learner absorbs sufficient information over the first ten steps of a fixed
curriculum, but a slow learner needs 90 more steps of the same curriculum to achieve the
same, we will not count as experience for the fast learner the redundant last 90 steps during
which it did not learn anything, but we will count all 100 steps for the slow learner.
Defining intelligence
We have now established sufficient context and notations to formally express the intuitive
definition of intelligence stated earlier, “the intelligence of a system is a measure of its
skill-acquisition efficiency over a scope of tasks, with respect to priors, experience, and”
generalization difficulty.”
We consider an intelligent system
To simplify notations, we will denote
We then define the intelligence of
Intelligence of system over (sufficient case):
Intelligence of system over (optimal case):
Note that:
P plus E (priors plus experience) represents the total exposure of the system to information about the problem, including the information it starts with at the beginning of training.- The sum over a curriculum subspace, weighted by the probability of each curriculum, represents the expected outcome for the system after training. Note that the sum is over a subspace of curricula (curricula that lead to at least a certain skill level), and thus the probabilities would sum to a total lower than one: as such, we are penalizing learners that only reach sufficient skill or optimal skill some of the time.
omega T times theta T represents the subjective value we place on achieving sufficient skill atT , andomega T theta times theta represents the subjective value we place on achieving the skill level corresponding to the system’s full potentialtheta T I S max atT .- Schematically, the contribution of each task is: , which is further weighted by a value
omega which enables us to homogeneously compare skill at different tasks independently of the scale of their respective scoring functions.
Thus, we equate the intelligence of a system to a measure of the information-efficiency with which the system acquires its final task-specific skill (sufficient skill or highest possi-
ble skill) on average (probabilistic average over all applicable curricula), weighted by the developer-aware generalization difficulty of the task considered (as well as the task value
Or, in plain English: intelligence is the rate at which a learner turns its experience and priors into new skills at valuable tasks that involve uncertainty and adaptation.
Note that our definition is not the first formal definition of intelligence based on Algorithmic Information Theory. We are aware of three other AIT-based definitions: the C-Test
We bring the reader’s attention to a number of key observations about our formalism
- A high-intelligence system is one that can generate high-skill solution programs for high generalization difficulty tasks (i.e. tasks that feature high uncertainty about the future) using little experience and priors, i.e. it is a system capable of making highly efficient use of all of the information it has at its disposition to cover as much ground as possible in unknown parts of the situation space. Intelligence is, in a way, a conversion rate between information about part of the situation space, and the ability to perform well over a maximal area of future situation space, which will involve novelty and uncertainty (figure 3).
- The measure of intelligence is tied to a choice of scope (space of tasks and value function over tasks). It can also optionally be tied to a choice of sufficient skill levels across the tasks in the scope (sufficient case).
- Skill is not possessed by an intelligent system, it is a property of the output artifact of the process of intelligence (a skill program). High skill is not high intelligence: these are different concepts altogether.
- Intelligence must involve learning and adaptation, i.e. operationalizing information extracted from experience in order to handle future uncertainty: a system that starts out with the ability to perform well on evaluation situations for a task would have a very low developer-aware generalization difficulty for this task, and thus would score poorly on our intelligence metric.
- Intelligence is not curve-fitting: a system that merely produces the simplest possible skill program consistent with known data points could only perform well on tasks that feature zero generalization difficulty, by our definition. An intelligent system must generate behavioral programs that account for future uncertainty.
- The measure of intelligence is tied to curriculum optimization: a better curriculum space will lead to greater realized skill (on average) and to greater expressed intelligence (greater skill-acquisition efficiency).
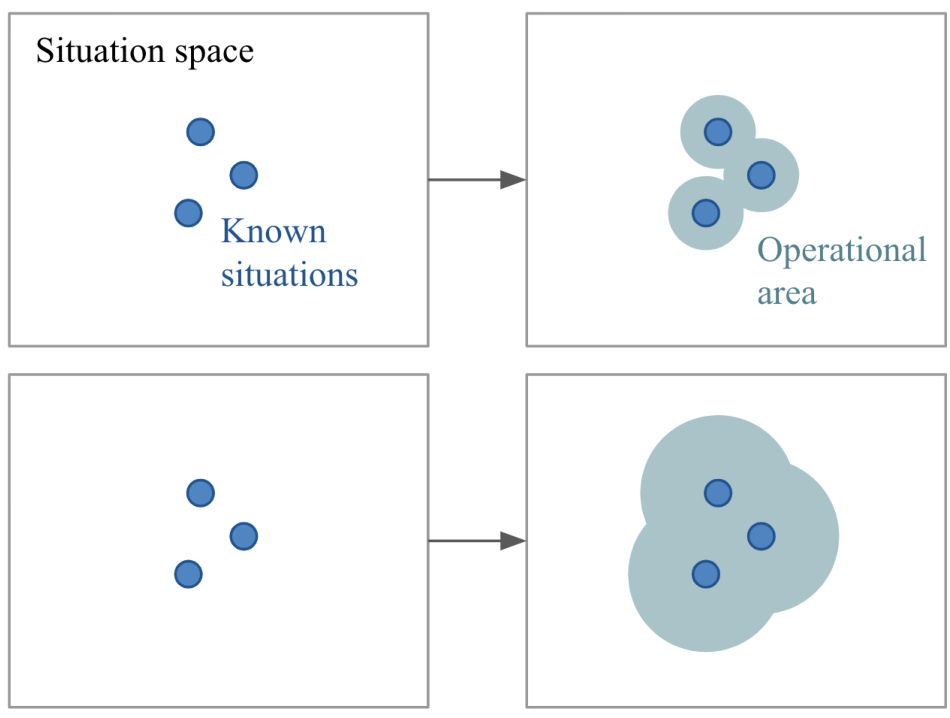
II.2.2 Computation efficiency, time efficiency, energy efficiency, and risk efficiency
In the above, we only considered the information-efficiency (prior-efficiency and experience-efficiency with respect to generalization difficulty) of intelligent systems. Indeed, we believe this is the most actionable and relevant angle today to move AI research forward
- Computation efficiency of skill programs: for settings in which training data is abundant but inference-time computation is expensive, one may want to encourage the generation of the skill programs that have minimal computational resource consumption.
- Computation efficiency of the intelligent system: for settings in which training-time computation is expensive, one may want to expend a minimal amount of computation resources to generate a skill program.
- Time efficiency: in time-constrained settings, one may want to minimize the latency with which the intelligent system generates skill programs.
- Energy efficiency: in biological systems in particular, one may want to minimize the amount of energy expended in producing a skill program, in running a skill program, or in going through a curriculum.
- Risk efficiency: for settings in which going through a curriculum (i.e. collecting experience) involves risk for the intelligent system, one might want to encourage safe curricula at the expense of resource efficiency or information efficiency. Much like
energy efficiency, this is highly relevant to biological systems and natural evolution, in which certain novelty-seeking behaviors that would lead to faster learning may also be more dangerous.
In fact, one may note that information efficiency acts in many settings as a proxy for energy efficiency and risk efficiency.
We expect that these alternative ways to quantify efficiency will become relevant in specialized AI application contexts in the future, and we bring them to the reader’s attention to encourage others to develop new formal definitions of intelligence incorporating them in addition to information efficiency.
II.2.3 Practical implications
The definitions above provide a formal framework as well as quantitative tools to reason about the intuitive notions we have been introducing so far, in particular the concepts of “generalization difficulty”, “intelligence as skill-acquisition efficiency”, and what it means to control for priors and experience when evaluating intelligence, as opposed to looking purely at task-specific skill.
The main value of this framework is to provide an actionable perspective shift in how we understand and evaluate flexible or general artificial intelligence. We argue that this perspective shift has the following practical consequences:
a. Consequences for research directions towards flexible or general AI:
-
It clearly spells out that the process of creating an intelligent system can be approached as an optimization problem, where the objective function would be a computable approximation of our quantitative intelligence formula. As pointed out in II.2.2, this objective function could be further refined by incorporating regularization terms that would take into account alternative forms of efficiency.
-
It encourages a focus on developing broad or general-purpose abilities rather than pursuing skill alone, by proposing a target metric that penalises excessive reliance on experience or priors, and discounting tasks that feature low generalization difficulty.
-
It encourages interest in program synthesis, by suggesting that we stop thinking of “agents” as monolithic black boxes that take in sensory input and produce behavior
(a vision inherited from Reinforcement Learning [88]) a vision inherited from reinforcement learning : our formalism clearly separates the part of the system that possesses intelligence (“intelligent system”, a program-synthesis engine) from the part that achieves skill or implements behavior (“skill program”, the non-intelligent output artifact of the process of intelligence), and places focus to the former. As we point out throughout this paper, we believe that this confusion between process and artifact has been an ongoing fundamental issue in the conceptualization of AI. -
It encourages interest in curriculum development, by leveraging the notion of an “optimal curriculum” and drawing attention to the fact that a better curriculum increases the intelligence manifested by a learning system.
-
It encourages interest in building systems based on human-like knowledge priors (e.g. Core Knowledge) by drawing attention to the importance of priors in evaluating intelligence.
b. Consequences for evaluating flexible or general AI systems:
- By defining and quantifying generalization difficulty, it offers a way to formally reason about what it means to perform “local generalization”, “broad generalization”, and “extreme generalization”
(cf. the spectrum of generalization introduced in I.3.2) , and to weed out tests that feature zero generalization difficulty. - It suggests concrete guidelines for comparing AI and human intelligence: such a comparison requires starting from a shared scope of tasks and shared priors, and would seek to compare experience-efficiency in achieving specific levels of skill. We detail this idea in II.3.1.
- It shows the importance of taking into account generalization difficulty when developing a test set to evaluate a task. We detail this idea in II.3.2. This should hopefully lead us to evaluation metrics that are able to discard solutions that rely on shortcuts that do not generalize (e.g. reliance on local textures as opposed to global semantics in computer vision).
- It provides a set of practical questions to ask about any intelligent system to rigorously characterize it:
- What is its scope?
- What is its “potential” over this scope (maximum achievable skill)?
- What priors does it possess?
- What is its skill-acquisition efficiency (intelligence)?
- What curricula would maximize its skill or skill-acquisition efficiency?
II.3 Evaluating intelligence in this light
Earlier in this document, we have detailed how measuring skill alone does not move us forward when it comes to the development of broad abilities, we have suggested that AI evaluation should learn from its more mature sister field psychometrics (echoing the thesis of Psychometric AI and Universal Psychometrics), and we have provided a new formalism with practical implications for AI evaluation, pointing out the importance of the concept of scope, potential, generalization difficulty, experience, and priors. The following section summarizes key practical conclusions with respect to AI evaluation.
II.3.1 Fair comparisons between intelligent systems
We mentioned in II.2.3 that our formalism suggests concrete guidelines for comparing the intelligence of systems of different nature, such as human intelligence and artificial intelligence. Being able to make such comparisons in a fair and rigorous way is essential to
progress towards human-like general AI. Here we argue how such intelligence comparisons between systems entail specific requirements with regard to the target systems’ scope, potential, and priors. We also detail how such comparisons should proceed given that these requirements are met.
Scope and potential requirements. In
Further, we must consider that the target systems may have different potential (maximum achievable skill) over their shared scope. An intelligence comparison should focus on skill-acquisition efficiency, but skill-acquisition efficiency cannot be meaningfully compared between systems that arrive at vastly different levels of skills. As such, a comparison scale must be tied to a fixed threshold of skill over the scope of tasks considered. This skill threshold should be achievable by all target systems.
For instance, comparing a generally-intelligent system to human intelligence would only make sense if the scope of tasks that can be learned by the system is the same scope of tasks that can be learned by a typical human, and the comparison should focus on the efficiency with which the system achieves the same level of skill as a human expert. Comparing maximum realized skill does not constitute an intelligence comparison.
Prior knowledge requirements. Since the formalism of
However, it would be generally impractical to fully quantify prior knowledge. As such, we recommend only comparing the intelligence of systems that assume a sufficiently similar set of priors. This implies that any measure of intelligence should explicitly and exhaustively list the priors it assumes, an idea we detail below, in
If the above conditions are met (shared scope, well-defined skill threshold over scope, and comparable knowledge priors), then a fair intelligence comparison would then consist of contrasting the skill-acquisition efficiency profile of the target systems. The more intelligent system would be the one that uses the least amount of experience to arrive at the desired skill threshold in the average case. Alternatively, computation efficiency, energy efficiency, and risk efficiency may also be considered, as per
II.3.2 What to expect of an ideal intelligence benchmark
The recommendations below synthesizes the conclusions of this document with regard to the properties that a candidate benchmark of human-like general intelligence should possess.
- It should describe its scope of application and its own predictiveness with regard to this scope (i.e. it should establish validity). In practice, this would be achieved by empirically determining the statistical relationship between success on the benchmark and success on a range of real-world tasks.
- It should be reliable (i.e. reproducible). If an evaluation session includes stochastic elements, sampling different values for these elements should not meaningfully affect the results. Different researchers independently evaluating the same system or approach using the benchmark should arrive at the same conclusions.
- It should set out to measure broad abilities and developer-aware generalization:
- It should not be solely measuring skill or potential (maximum achievable skill).
- It should not feature in its evaluation set any tasks that are known in advance, either to the test-taking system itself or to the developers of the system
(cf. developer-aware generalization as defined in I.3.2) . - It should seek to quantify the generalization difficulty it measures
(cf. formal definition from II.2) , or at least provide qualitative guidelines with regard to its generalization difficulty: it should at least be made clear whether the benchmark seeks to measure local generalization (robustness), broad generalization (flexibility), or extreme generalization (general intelligence), as defined inI.3.2 section one point three point two . Taking into account generalization difficulty minimizes the possibility that a given benchmark could be “hacked” by solvers that take undesired shortcuts that bypass broad abilities (e.g. leveraging surface textures instead of semantic content in image recognition). - It should control for the amount of experience leveraged by test-taking systems during training. It should not be possible to “buy” performance on the benchmark by sampling unlimited training data. The benchmark should avoid tasks for which new data can be generated at will. It should be, in effect, a game for which it is not possible to practice in advance of the evaluation session.
- It should explicitly and exhaustively describe the set of priors it assumes. Any task is going to involve priors, but in many tasks used for AI evaluation today, priors stay implicit, and the existence of implicit hidden priors may often give an unfair advantage to either humans or machines.
- It should work for both humans and machines, fairly, by only assuming the same priors as possessed by humans (e.g. Core Knowledge) and only requiring a human-sized amount of practice time or training data.
These recommendations for general AI evaluation wouldn’t be complete without a concrete effort to implement them. In part III, we present our initial attempt.
III A benchmark proposal: the ARC dataset
In this last part, we introduce the Abstraction and Reasoning Corpus (ARC), a dataset intended to serve as a benchmark for the kind of general intelligence defined in
III.1 Description and goals
III.1.1 What is ARC?
ARC can be seen as a general artificial intelligence benchmark, as a program synthesis benchmark, or as a psychometric intelligence test. It is targeted at both humans and artificially intelligent systems that aim at emulating a human-like form of general fluid intelligence. It is somewhat similar in format to Raven’s Progressive Matrices
ARC has the following top-level goals:
- Stay close in format to psychometric intelligence tests (while addressing issues found in previous uses of such tests for AI evaluation, as detailed in
III.1.3 ), so as to be approachable by both humans and machines; in particular it should be solvable by humans without any specific practice or training. - Focus on measuring developer-aware generalization, rather than task-specific skill, by only featuring novel tasks in the evaluation set (assumed unknown to the developer of a test-taker).
- Focus on measuring a qualitatively “broad” form of generalization
(cf. I.3.2) , by featuring highly abstract tasks that must be understood by a test-taker using very few examples. - Quantitatively control for experience by only providing a fixed amount of training data for each task and only featuring tasks that do not lend themselves well to artificially generating new data.
- Explicitly describe the complete set of priors it assumes (listed in
III.1.2 ), and enable a fair general intelligence comparison between humans and machines by only requiring priors close to innate human prior knowledge(cf. II.3.2) .
ARC comprises a training set and an evaluation set. The training set features 400 tasks, while the evaluation set features 600 tasks. The evaluation set is further split into a public evaluation set (400 tasks) and a private evaluation set (200 tasks). All tasks are unique, and the set of test tasks and the set of training tasks are disjoint. The task data is available at github.com/fchollet/ARC.
Each task consists of a small number of demonstration examples (3.3 on average), and a small number of test examples (generally 1, although it may be 2 or 3 in rare cases). Each example consists of an “input grid” and an “output grid”. Each “grid” is a literal grid of
symbols (each symbol is typically visualized via a unique color), as seen in figure 4. There are 10 unique symbols (or colors). A grid can be any height or width between
When solving an evaluation task, a test-taker has access to the training examples for the task (both the input and output grids), as well as the input grid of the test examples for the task. The test-taker must construct on its own the output grid corresponding to the input grid of each test example. “Constructing the output grid” is done entirely from scratch, meaning that the test-taker must decide what the height and width of the output grid should be, what symbols it should place on the grid, and where. The task is successfully solved if the test-taker can produce the exact correct answer on all test examples for the task (binary measure of success). For each test example in a task, the test-taker (either human or machine) is allowed 3 trials10. The only feedback received after a trial is binary (correct answer or incorrect answer). The score of an intelligent system on ARC is the fraction of tasks in the evaluation set that it can successfully solve. Crucially, it is assumed that neither the test-taker nor its developer would have had any prior information about the tasks featured in the evaluation set: ARC seeks to measure “developer aware generalization” as defined in
A test-taker is also assumed to have access to the entirety of the training set, although the training data isn’t strictly necessary in order to be successful on the validation set, as all tasks are unique and do not assume any knowledge other than the priors described in
III.1.2 Core Knowledge priors
Any test of intelligence is going to involve prior knowledge. ARC seeks to control for its own assumptions by explicitly listing the priors it assumes, and by avoiding reliance on any information that isn’t part of these priors (e.g. acquired knowledge such as language). The ARC priors are designed to be as close as possible to Core Knowledge priors, so as to provide a fair ground for comparing human intelligence and artificial intelligence, as per our recommendations in
The Core Knowledge priors assumed by ARC are as follows:
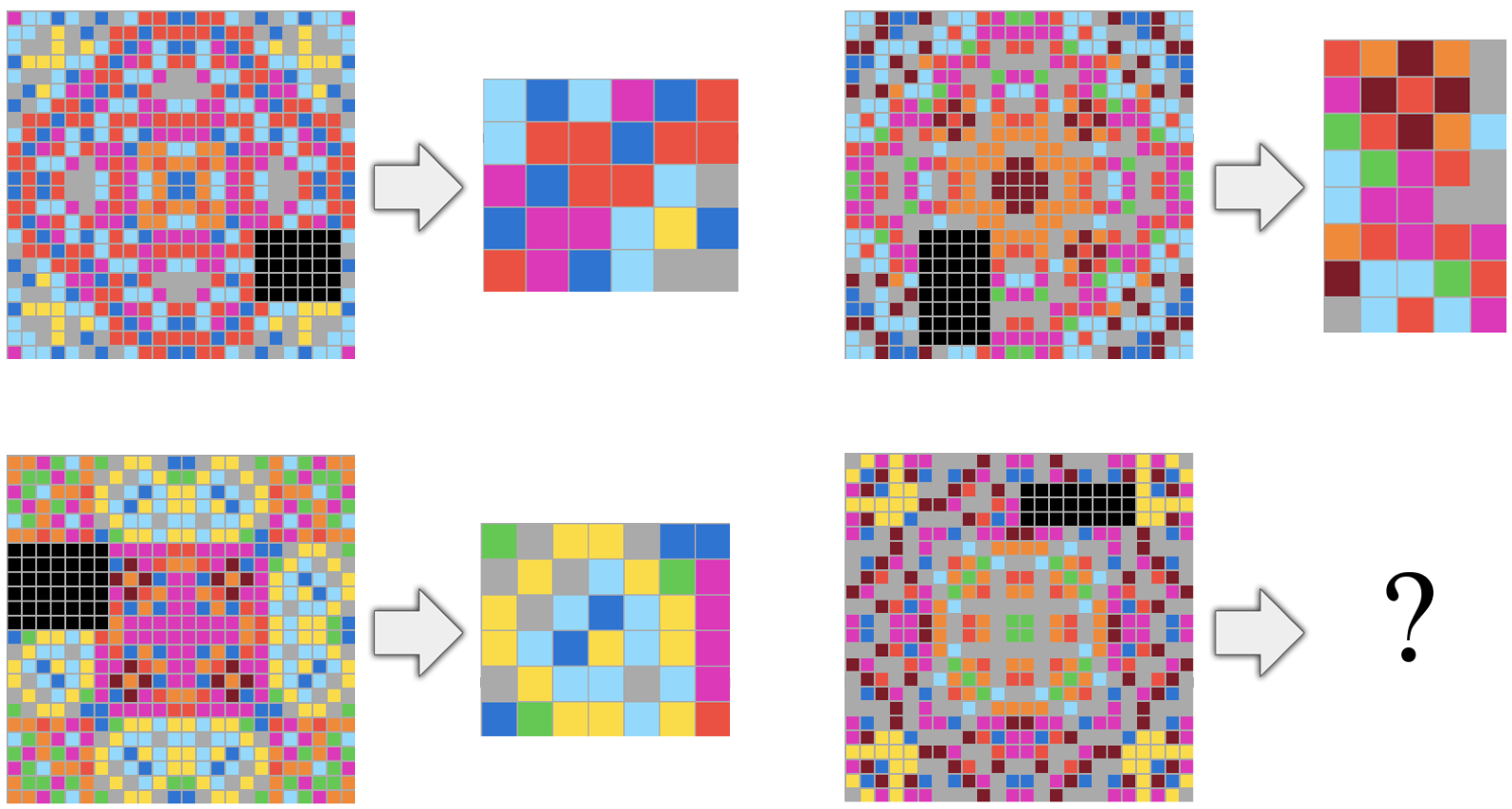
a. Objectness priors:
Object cohesion: Ability to parse grids into “objects” based on continuity criteria including color continuity or spatial contiguity (figure 5), ability to parse grids into zones, partitions.
Object persistence: Objects are assumed to persist despite the presence of noise
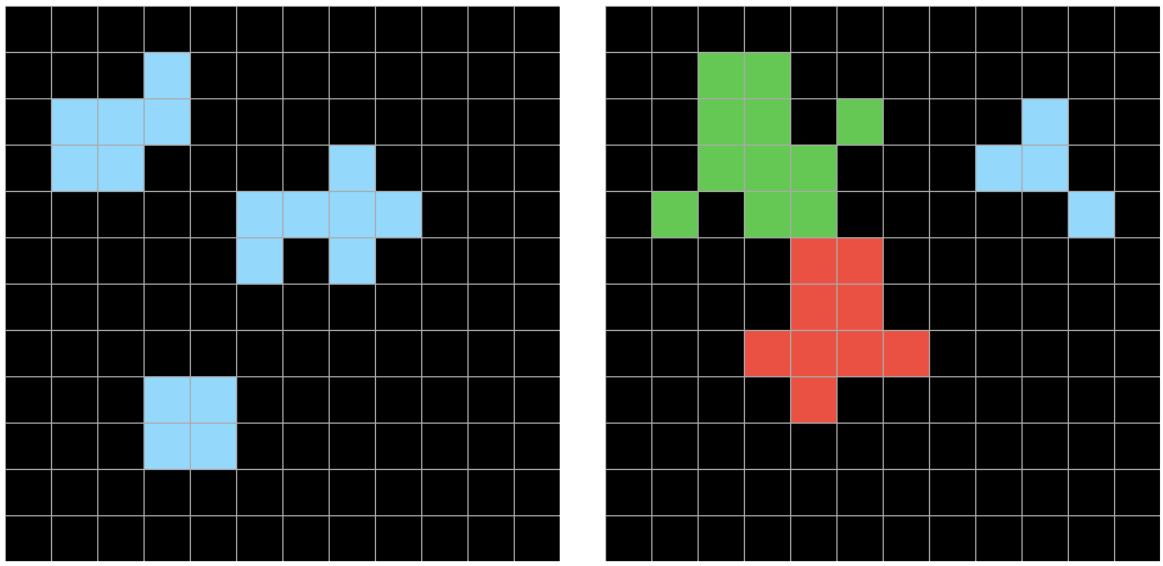
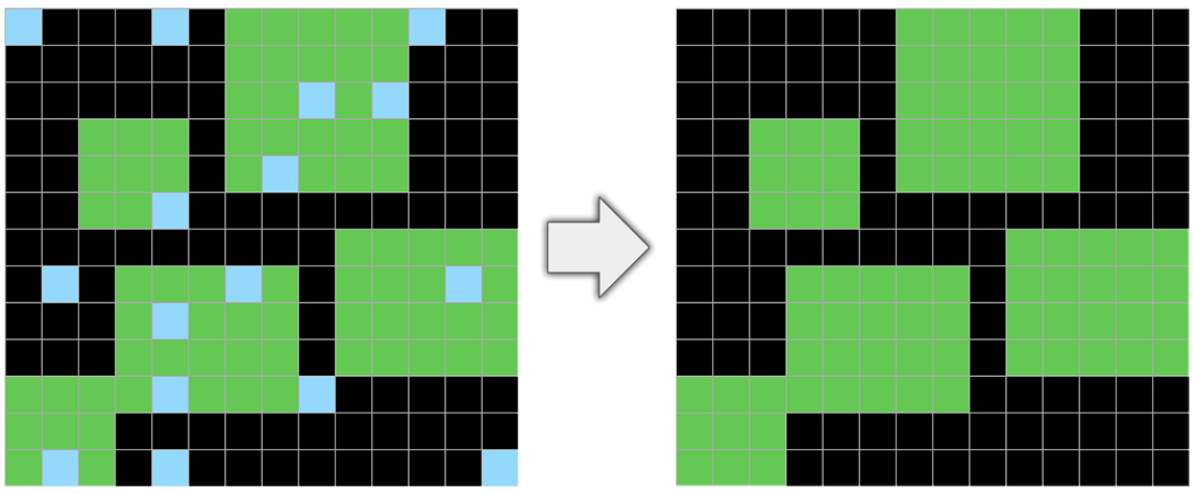
Object influence via contact: Many tasks feature physical contact between objects (e.g. one object being translated until it is in contact with another (figure 7), or a line “growing” until it “rebounds” against another object (figure 8).
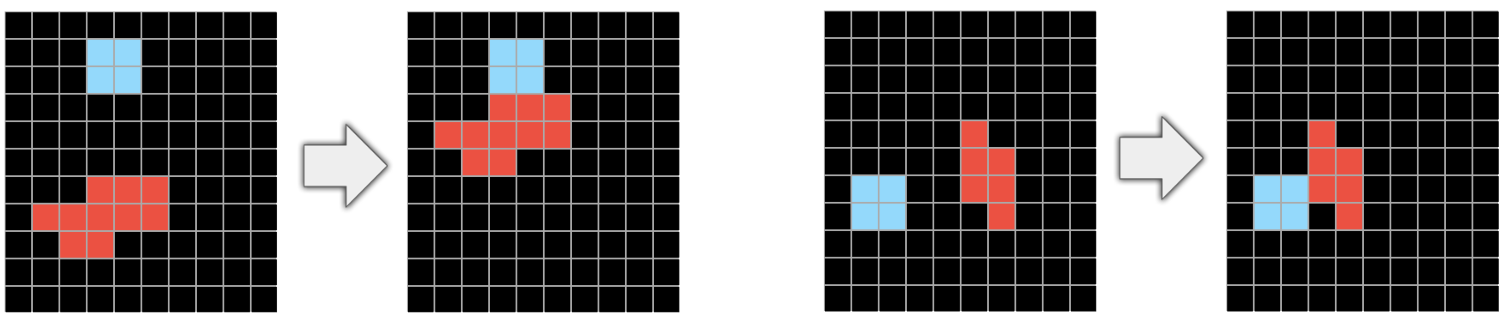
b. Goal-directedness prior:
While ARC does not feature the concept of time, many of the input/output grids can be effectively modeled by humans as being the starting and end states of a process that involves intentionality (e.g. figure 9). As such, the goal-directedness prior may not be strictly necessary to solve ARC, but it is likely to be useful.
c. Numbers and Counting priors:
Many ARC tasks involve counting or sorting objects (e.g. sorting by size), comparing numbers (e.g. which shape or symbol appears the most (e.g. figure 10)? The least? The same number of times? Which is the largest object? The smallest? Which objects are the same size?), or repeating a pattern for a fixed number of time. The notions of addition and subtraction are also featured (as they are part of the Core Knowledge number system as per
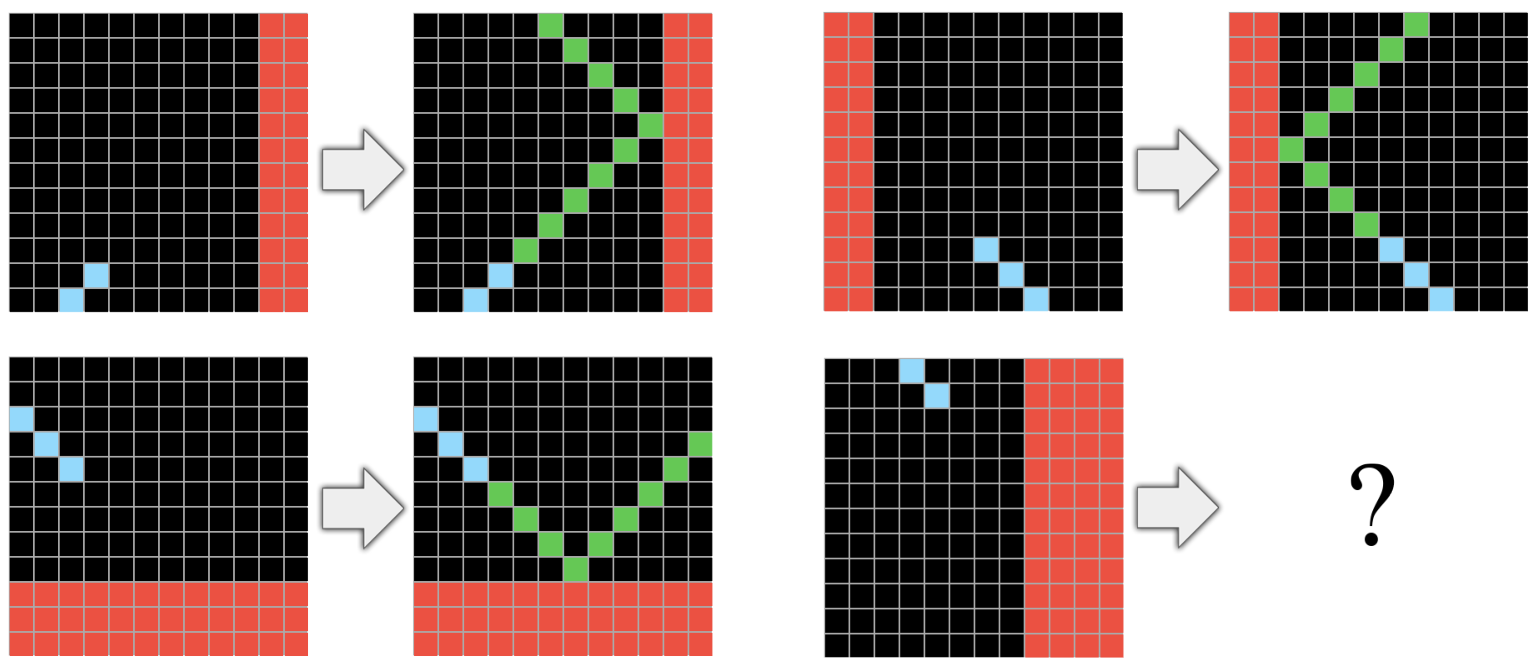
d. Basic Geometry and Topology priors:
ARC tasks feature a range of elementary geometry and topology concepts, in particular:
- Lines, rectangular shapes (regular shapes are more likely to appear than complex shapes).
- Symmetries
(e.g. figure 11) , rotations, translations. - Shape upscaling or downscaling, elastic distortions.
- Containing / being contained / being inside or outside of a perimeter.
- Drawing lines, connecting points, orthogonal projections.
- Copying, repeating objects.
III.1.3 Key differences with psychometric intelligence tests
We have pointed out in I.3.4 the reasons why using existing psychometric intelligence tests (or “IQ tests”) does not constitute a sound basis for AI evaluation. Albeit ARC stays deliberately close in format to traditional IQ tests (as well as related efforts such as
- Unlike some psychometric intelligence tests, ARC is not interested in assessing crystallized intelligence or crystallized cognitive abilities. ARC only assesses a general form of fluid intelligence, with a focus on reasoning and abstraction. ARC does not involve language, pictures of real-world objects, or real-world common sense. ARC seeks to only involve knowledge that stays close to Core Knowledge priors,
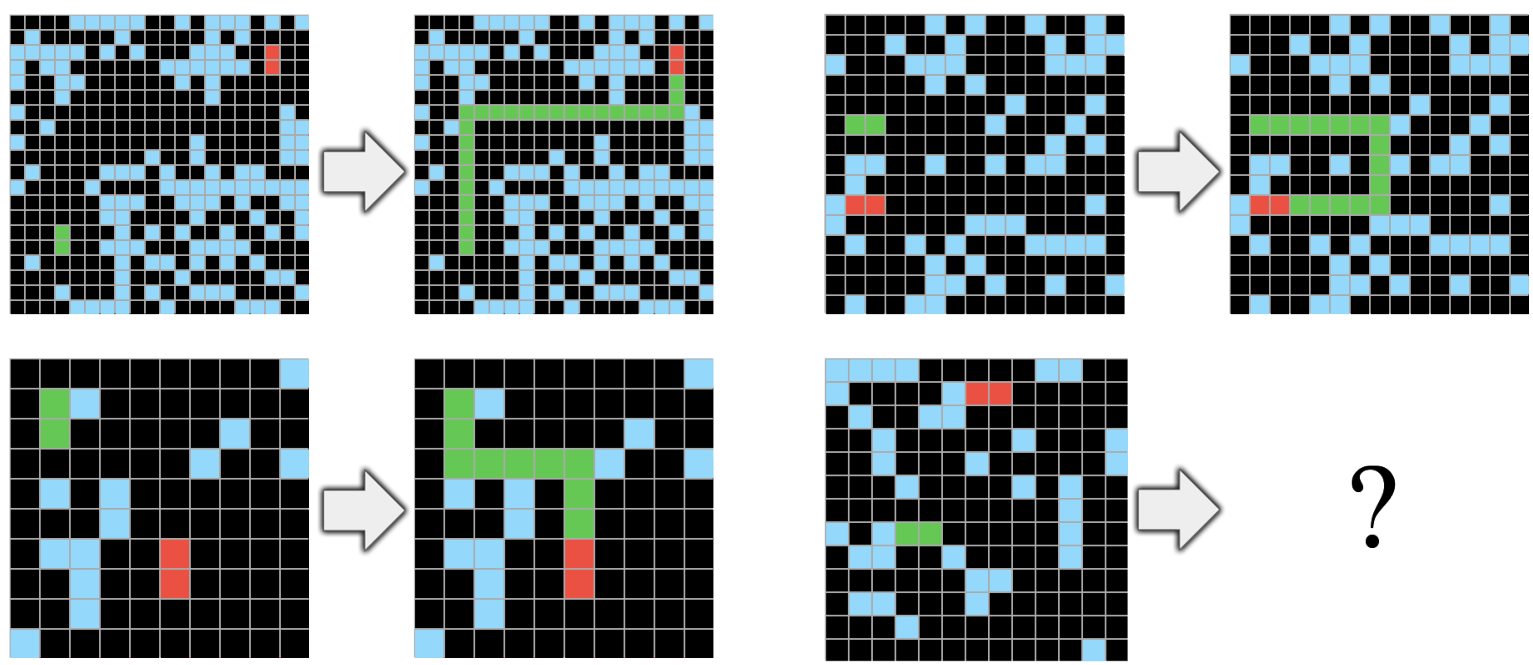
and avoids knowledge that would have to be acquired by humans via task-specific practice.
- The tasks featured in the ARC evaluation set are unique and meant to be unknown to developers of test-taking systems (as ARC seeks to assess developer-aware generalization). This prevents developers from solving the tasks themselves and hard-coding their solution in program form. This can be strictly enforced in competition settings via the existence of a private evaluation set.
- ARC has greater task diversity than typical psychometric intelligence tests (hundreds of unique tasks with limited overlap between tasks), which reduces the likelihood that hard-coding task-specific solutions would represent a practical shortcut for developers, even for the public evaluation set.
- Unlike tasks from the C-Test
[40] , ARC tasks are in majority not programmatically generated. We perceive programmatic generation from a static “master” program as a weakness, as it implies that merely reverse-engineering the generative program shared across tasks (presumably a simple program, since it had to be written down by the test developer) would be sufficient to fully solve all tasks. Manual task generation increases task diversity and reduces the risk of existence of an unforeseen shortcut that could be used to by-pass the need for broad abilities in solving the test.
III.1.4 What a solution to ARC may look like, and what it would imply for AI applications
We have found ARC to be fully solvable by humans. While many ARC test tasks are intellectually challenging, human test-takers appear to be able to solve the majority of tasks on their first try without any practice or verbal explanations. Each task included in ARC has been successfully solved by at least one member of a group of three high-IQ humans
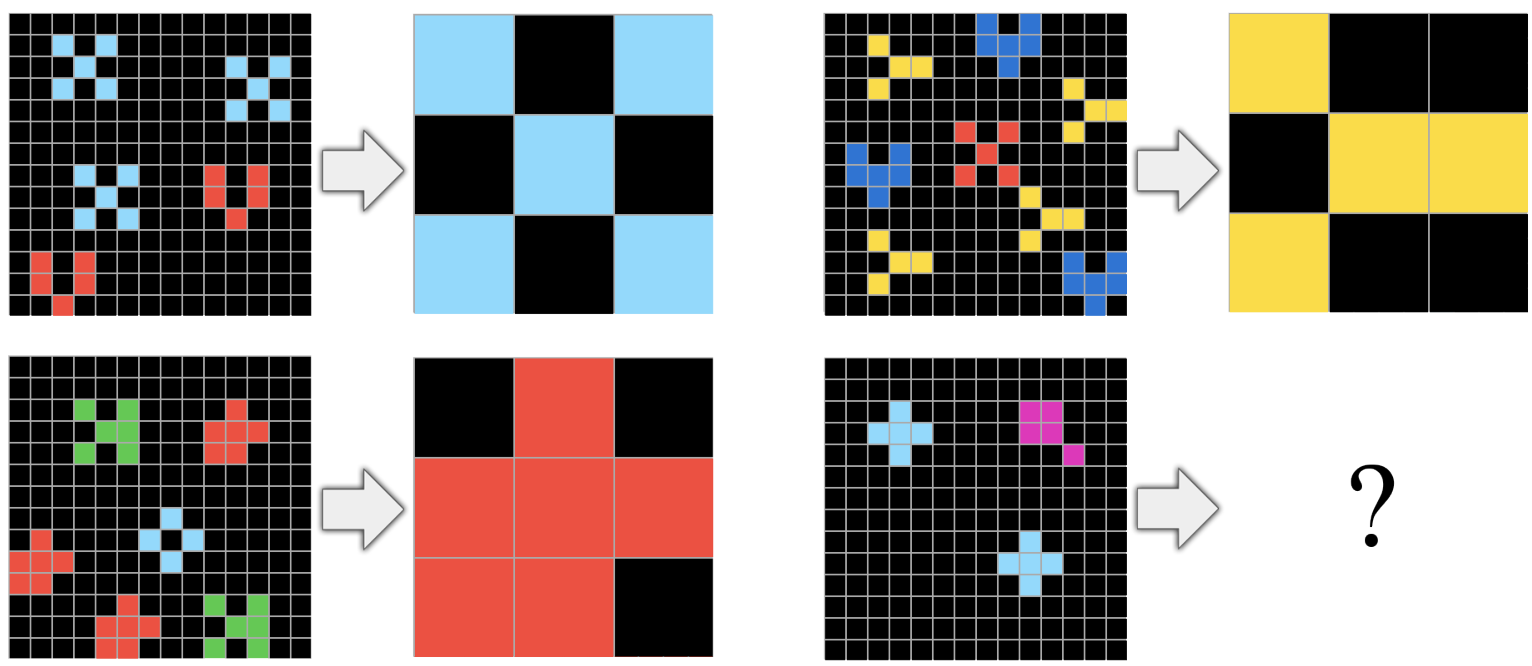
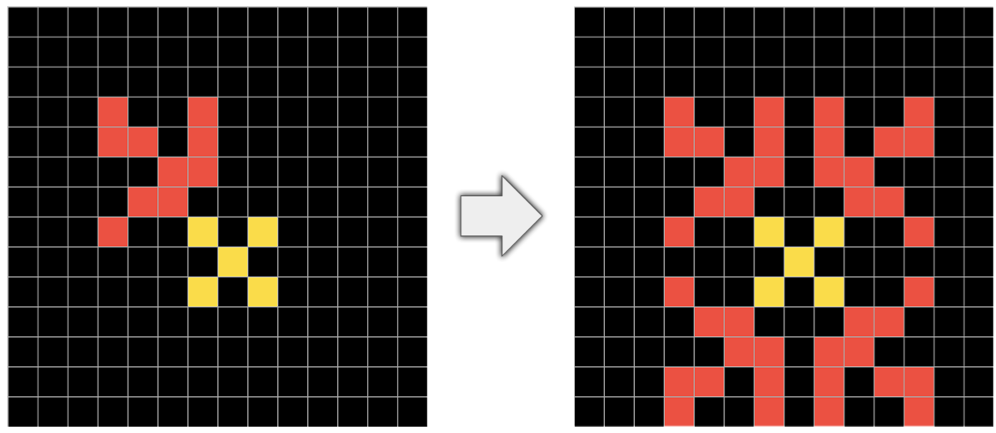
(who did not communicate with each other), which demonstrates task feasibility. In the future, we hope to be able to further investigate human performance on ARC by gathering a statistically significant amount of human testing data, in particular with regard to the relationship between CHC cognitive abilities and ARC performance.
Crucially, to the best of our knowledge, ARC does not appear to be approachable by any existing machine learning technique (including Deep Learning), due to its focus on broad generalization and few-shot learning, as well as the fact that the evaluation set only features tasks that do not appear in the training set.
For a researcher setting out to solve it, ARC is perhaps best understood as a program synthesis benchmark. Program synthesis
A hypothetical ARC solver may take the form of a program synthesis engine that uses the demonstration examples of a task to generate candidates that transform input grids into corresponding output grids. Schematically:
- Start by developing a domain-specific language (DSL) capable of expressing all possible solution programs for any ARC task. Since the exact set of ARC tasks is purposely not formally definable, this may be challenging (the space of tasks is defined as anything expressible in terms of ARC pairs that would only involve Core Knowledge). It would require harding-coding the Core Knowledge priors from
III.1.2 in a sufficiently abstract and combinable program form, to serve as basis functions for a kind of “human-like reasoning DSL”. We believe that solving this specific subproblem is critical to general AI progress. - Given a task, use the DSL to generate a set of candidate programs that turn the inputs grids into the corresponding output grids. This step would reuse and recombine subprograms that previously proved useful in other ARC tasks.
- Select top candidates among these programs based on a criterion such as program simplicity or program likelihood (such a criterion may be trained on solution programs previously generated using the ARC training set). Note that we do not expect that merely selecting the simplest possible program that works on training pairs will generalize well to test pairs
(cf. our definition of generalization difficulty from II.2) . - Use the top three candidates to generate output grids for the test examples.
We posit that the existence of a human-level ARC solver would represent the ability to program an AI from demonstrations alone (only requiring a handful of demonstrations to specify a complex task) to do a wide range of human-relatable tasks of a kind that would normally require human-level, human-like fluid intelligence. As supporting evidence, we note that human performance on psychometric intelligence tests (which are similar to ARC) is predictive of success across all human cognitive tasks. Further, we posit that, since an ARC solver and human intelligence would both be founded on the same knowledge priors, the scope of application of an ARC solver would be close to that of human cognition, making such a solver both practically valuable (i.e. it could solve useful, human-relevant problems) and easy to interact with (i.e. it would readily understand human demonstrations and would produce behavior that is in line with human expectations).
Our claims are highly speculative and may well prove fully incorrect, much like Newell’s 1973 hopes that progress on chess playing would translate into meaningful progress on achieving a range of broad cognitive abilities — especially if ARC turns out to feature unforeseen vulnerabilities to unintelligent shortcuts. We expect our claims to be validated or invalidated in the near future once we make sufficient progress on solving ARC.
III.2 Weaknesses and future refinements
It is important to note that ARC is a work in progress, not a definitive solution; it does not fit all of the requirements listed in
- Generalization is not quantified. While ARC is explicitly designed to measure “broad generalization” as opposed to “local generalization” or “extreme generalization”, we do not offer a quantitative measure of the generalization of the evaluation
set given the test set, or the generalization difficulty of each task (considered independently). We plan on conducting future work to empirically address this issue by using human performance on a task (considered over many human subjects) to estimate the generalization difficulty it represents. We would be particularly interested in attempting to correlate human performance on a task with an approximation of the AIT measure of generalization difficulty proposed in
- Test validity is not established. Validity represents the predictiveness of test performance with regard to performance on other non-test activities. The validity of ARC should be investigated via large-sample size statistical studies on humans, following the process established by psychometrics. Further, when AI ARC solvers become a reality, we will also be able to study how well ARC performance translates into real-world usefulness across a range of tasks.
- Dataset size and diversity may be limited. ARC only features 1,000 tasks in total, and there may be some amount of conceptual overlap across many tasks. This could make ARC potentially vulnerable to shortcut strategies that could solve the tasks without featuring intelligence. We plan on running public AI competitions (using the private evaluation set) as a way to crowd-source attempts to produce such shortcuts (if a shortcut exists, it should arise quickly in a competition setting). Further, to mitigate potential vulnerability against such shortcuts, we intend to keep adding new tasks to ARC in the future, possibly by crowd-sourcing them.
- The evaluation format is overly close-ended and binary. The score of a test-taker on an evaluation task is either 0 or 1, which lacks granularity. Further, real-world problem-solving often takes the form of an interactive process where hypotheses are formulated by the test-taker then empirically tested, iteratively. In ARC, this approach is possible to an extent since the test-taker is allowed 3 trials for each test example in a task. However, this format remains overly limiting. A better approach may be let the test taker dynamically interact with an example generator for the task: the test taker would be able to ask for a new test input at will, would propose a solution for the test input, and would receive feedback on their solution, repeatedly, until the test-taker is reliably able to produce the correct answer. The test-taker’s score on the task would then be a measure of the amount of feedback it required until it became able to reliably generate the correct solution for any new input. This represents a more direct measure of intelligence as formally defined in
II.2 section two point two , where the input generator is in control of the curriculum. - Core Knowledge priors may not be well understood and may not be well captured in ARC. Central to ARC is the notion that it only relies on innate human prior knowledge and does not feature significant amounts of acquired knowledge. However, the exact nature of innate human prior knowledge is still an open problem, and whether these priors are correctly captured in ARC is unclear.
III.3 Possible alternatives
ARC is merely one attempt to create a human-like general intelligence benchmark that embodies as many of the guidelines listed in
III.3.1 Repurposing skill benchmarks to measure broad generalization
We noted in
Consider an AI developer interested in solving game
The AI trained on
For instance, consider the game DotA2. An AI trained on DotA2 may be evaluated by measuring the efficiency with which it can learn to play new games from the same genre, such as League of Legends or Heroes of the Storm. As an even simpler (but weaker) alternative, an AI trained on 16 specific DotA2 characters may be evaluated by measuring the efficiency with which it can learn to master a set of brand new characters it would not have played before — for example, a strong human DotA2 player can play at a high level with a new character upon first try.
III.3.2 Open-ended adversarial or collaborative approaches
We have pointed out in
is not easily scalable (although crowd-sourcing tasks may partially address this problem). The diversity and scalablility points are especially critical given that we need a constant supply of substantially new tasks in order to guarantee that the benchmark is measuring developer-aware generalization.
A solution may be to instead programmatically generate new tasks. We noted in
In order to make sure that the space of generated tasks retains sufficient complexity and novelty over time, the teacher program should draw information from an external source (assumed to feature incompressible complexity), such as the real world. This external source of complexity makes the setup truly open-ended. A teacher program that generates novel tasks that partially emulate human-relevant tasks would have the added advantage that it would guide the resulting student programs towards a form of intelligence that could transfer to real-world human-relevant problems.

Taking stock
The study of general artificial intelligence is a field still in its infancy, and we do not wish to convey the impression that we have provided a definitive solution to the problem of characterizing and measuring the intelligence held by an AI system. Rather, we have introduced a new perspective on defining and evaluating intelligence, structured around the following ideas:
- Intelligence is the efficiency with which a learning system turns experience and priors into skill at previously unknown tasks.
- As such, a measure of intelligence must account for priors, experience, and generalization difficulty.
- All intelligence is relative to a scope of application. Two intelligent systems may only be meaningfully compared within a shared scope and if they share similar priors.
- As such, general AI should be benchmarked against human intelligence and should be founded on a similar set of knowledge priors (e.g. Core Knowledge).
We also have provided a new formalism based on Algorithmic Information Theory
Our definition, formal framework, and evaluation guidelines, which do not capture all facets of intelligence, were developed to be actionable, explanatory, and quantifiable, rather than being descriptive, exhaustive, or consensual. They are not meant to invalidate other perspectives on intelligence, rather, they are meant to serve as a useful objective function to guide research on broad AI and general AI, as outlined in
To ground our ideas and enable others to build upon them, we are also providing an actual benchmark, the Abstraction and Reasoning Corpus, or ARC:
- ARC takes the position that intelligence testing should control for scope, priors, and experience: every test task should be novel (measuring the ability to understand a new task, rather than skill) and should assume an explicit set of priors shared by all test-takers.
- ARC explicitly assumes the same Core Knowledge priors innately possessed by humans.
- ARC can be fully solved by humans, but cannot be meaningfully approached by current machine learning techniques, including Deep Learning.
- ARC may offer an interesting playground for AI researchers who are interested in developing algorithms capable of human-like broad generalization. It could also offer a way to compare human intelligence and machine intelligence, as we assume the same priors.
Importantly, ARC is still a work in progress, with known weaknesses listed in
The measure of the success of our message will be its ability to divert the attention of some part of the community interested in general AI, away from surpassing humans at
tests of skill, towards investigating the development of human-like broad cognitive abilities, through the lens of program synthesis, Core Knowledge priors, curriculum optimization, information efficiency, and achieving extreme generalization through strong abstraction.
References
[2] John R. Anderson and Christian Lebiere. The newell test for a theory of cognition. Behavioral and Brain Sciences, pages 587–601, 2003.
[3] Aristotle. De Anima. c. 350 BC.
[4] Minoru Asada et al. Cognitive developmental robotics: A survey. IEEE Transactions on Autonomous Mental Development, pages 12–34, 2009.
[5] Mayank Bansal, Alex Krizhevsky, and Abhijit Ogale. Chauffeurnet: Learning to drive by imitating the best and synthesizing the worst. arXiv preprint arXiv:1812.03079, 2018.
[6] Marc G. Bellemare, Yavar Naddaf, Joel Veness, and Michael Bowling. The arcade learning environment: An evaluation platform for general agents. J. Artif. Int. Res., (1):253–279, May 2013.
[7] Benjamin Beyret, Jos Hernndez-Orallo, Lucy Cheke, Marta Halina, Murray Shanahan, and Matthew Crosby. The animal-ai environment: Training and testing animal-like artificial cognition, 2019.
[8] Alfred Binet and Thodore Simon. Mthodes nouvelles pour le diagnostic du niveau intellectuel des anormaux. L’anne psychologique, pages 191–244, 1904.
[9] Selmer Bringsjord and Bettina Schimanski. What is artificial intelligence? psychometric ai as an answer. In Proceedings of the 18th International Joint Conference on Artificial Intelligence, IJCAI’03, pages 887–893, San Francisco, CA, USA, 2003. Morgan Kaufmann Publishers Inc.
[10] Jacob Buckman, Danijar Hafner, George Tucker, Eugene Brevdo, and Honglak Lee. Sample-efficient reinforcement learning with stochastic ensemble value expansion, 2018.
[11] Martin Buehler, Karl Iagnemma, and Sanjiv Singh. The 2005 DARPA Grand Challenge: The Great Robot Race. Springer Publishing Company, Incorporated, 1st edition, 2007.
[12] Murray Campbell, A. Joseph Hoane, Jr., and Feng-hsiung Hsu. Deep blue. Artif. Intell., (1-2):57–83, 2002.
[13] Raymond B. Cattell. Abilities: Their structure, growth, and action. 1971.
[14] G. Chaitin. Algorithmic Information Theory. Cambridge University Press, 1987.
[16] Francois Chollet. Deep Learning with Python. Manning Publications, 2017.
[17] Karl Cobbe, Oleg Klimov, Christopher Hesse, Taehoon Kim, and John Schulman. Quantifying generalization in reinforcement learning. CoRR, 2018.
[18] Ebinepre A Cocodia. Cultural perceptions of human intelligence. Journal of Intelligence, 2(4):180–196, 2014.
[19] L. Cosmides and J. Tooby. Origins of domain specificity: the evolution of functional organization. page 85116, 1994.
[20] Linda Crocker and James Algina. Introduction to classical and modern test theory. ERIC, 1986.
[21] Charles Darwin. The Origin of Species. 1859.
[22] J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and L. Fei-Fei. ImageNet: A Large-Scale Hierarchical Image Database. In CVPR09, 2009.
[23] D. K. Detterman. A challenge to watson. Intelligence, page 7778, 2011.
[24] T.G. Evans. A program for the solution of a class of geometric-analogy intelligence-test questions. pages 271–353, 1968.
[25] James R Flynn. What is intelligence?: Beyond the Flynn effect. Cambridge University Press, 2007.
[26] Richard M Friedberg. A learning machine: Part i. IBM Journal of Research and Development, 2(1):2–13, 1958.
[27] Manuela Veloso Gary Marcus, Francesca Rossi. Beyond the Turing Test (workshop), 2014.
[28] B. Goertzel and C. Pennachin, editors. Artificial general intelligence. Springer, New York, 2007.
[29] Bert F Green Jr. Intelligence and computer simulation. Transactions of the New York Academy of Sciences, 1964.
[30] Peter D. Grünwald and Paul M. B. Vitányi. Algorithmic information theory. 2008.
[31] Sumit Gulwani, José Hernández-Orallo, Emanuel Kitzelmann, Stephen H Muggleton, Ute Schmid, and Benjamin Zorn. Inductive programming meets the real world. Communications of the ACM, 58(11):90–99, 2015.
[32] Sumit Gulwani, Alex Polozov, and Rishabh Singh. Program Synthesis. 2017.
[33] William H. Guss, Cayden Codel, Katja Hofmann, Brandon Houghton, Noburu Kuno, Stephanie Milani, Sharada Prasanna Mohanty, Diego Perez Liebana, Ruslan Salakhutdinov, Nicholay Topin, Manuela Veloso, and Phillip Wang. The minerl competition on sample efficient reinforcement learning using human priors. CoRR, 2019.
[35] Islam R. Bachman P. Pineau J. Precup D. Henderson, P. and D. Meger. Deep reinforcement learning that matters. 2018.
[36] José Hernández-Orallo. Evaluation in artificial intelligence: from task-oriented to ability-oriented measurement. Artificial Intelligence Review, pages 397–447, 2017.
[37] José Hernández-Orallo. The Measure of All Minds: Evaluating Natural and Artificial Intelligence. Cambridge University Press, 2017.
[38] José Hernández-Orallo and David L Dowe. Measuring universal intelligence: Towards an anytime intelligence test. Artificial Intelligence, 174(18):1508–1539, 2010.
[39] José Hernández-Orallo, David L. Dowe, and M. Victoria Hernández-Lloreda. Universal psychometrics. Cogn. Syst. Res., (C):50–74, March 2014.
[40] José Hernández-Orallo and Neus Minaya-Collado. A formal definition of intelligence based on an intensional variant of algorithmic complexity. 1998.
[41] G.E. Hinton. How neural networks learn from experience. Mind and brain: Readings from the Scientific American magazine, page 113124, 1993.
[42] Thomas Hobbes. Human Nature: or The fundamental Elements of Policie. 1650.
[43] Marcus Hutter. Universal artificial intelligence: Sequential decisions based on algorithmic probability. Springer Science & Business Media, 2004.
[44] D.L. Dowe J. Hernández-Orallo. Iq tests are not for machines, yet. Intelligence, page 7781, 2012.
[45] Yiding Jiang, Dilip Krishnan, Hossein Mobahi, and Samy Bengio. Predicting the generalization gap in deep networks with margin distributions. arXiv, 2018.
[46] Jason Jo and Yoshua Bengio. Measuring the tendency of cnns to learn surface statistical regularities. arXiv, 2017.
[47] Raven J. John. Raven Progressive Matrices. Springer, Boston, MA, 2003.
[48] Wendy Johnson and Thomas J. Bouchard Jr. The structure of human intelligence: It is verbal, perceptual, and image rotation (vpr), not fluid and crystallized. Intelligence, pages 393–416, 2005.
[49] Arthur Juliani, Ahmed Khalifa, Vincent-Pierre Berges, Jonathan Harper, Ervin Teng, Hunter Henry, Adam Crespi, Julian Togelius, and Danny Lange. Obstacle tower: A generalization challenge in vision, control, and planning. Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, Aug 2019.
[50] Niels Justesen, Ruben Rodriguez Torrado, Philip Bontrager, Ahmed Khalifa, Julian Togelius, and Sebastian Risi. Illuminating generalization in deep reinforcement learning through procedural level generation. arXiv preprint arXiv:1806.10729, 2018.
[52] Yann LeCun, Yoshua Bengio, and Geoffrey Hinton. Deep learning. nature, (7553):436, 2015.
[53] Shane Legg and Marcus Hutter. A collection of definitions of intelligence. 2007.
[54] Shane Legg and Marcus Hutter. Universal intelligence: A definition of machine intelligence. Minds and machines, 17(4):391–444, 2007.
[55] Ming Li, Paul Vitányi, et al. An introduction to Kolmogorov complexity and its applications, volume 3. Springer.
[56] John Locke. An Essay Concerning Human Understanding. 1689.
[57] James Macgregor and Yun Chu. Human performance on the traveling salesman and related problems: A review. The Journal of Problem Solving, 3, 02 2011.
[58] James Macgregor and Thomas Ormerod. Human performance on the traveling salesman problem. Perception & psychophysics, 58:527–39, 06 1996.
[59] Gary Marcus. Deep learning: A critical appraisal. arXiv, 2018.
[60] John McCarthy. Generality in artificial intelligence. Communications of the ACM, 30(12):1030–1035, 1987.
[61] Pamela McCorduck. Machines Who Think: A Personal Inquiry into the History and Prospects of Artificial Intelligence. AK Peters Ltd, 2004.
[62] Kevin McGrew. The cattell-horn-carroll theory of cognitive abilities: Past, present, and future. Contemporary Intellectual Assessment: Theories, Tests, and Issues, 01 2005.
[63] Marvin Minsky. Society of mind. Simon and Schuster, 1988.
[64] May-Britt Moser, David C Rowland, and Edvard I Moser. Place cells, grid cells, and memory. Cold Spring Harbor perspectives in biology, 7(2):a021808, 2015.
[65] Shane Mueller, Matt Jones, Brandon Minnery, Ph Julia, and M Hiland. The bica cognitive decathlon: A test suite for biologically-inspired cognitive agents. Proceedings of the 16th Conference on Behavior Representation in Modeling and Simulation, 2007.
[66] A. Newell. You cant play 20 questions with nature and win: Projective comments on the papers of this symposium. 1973.
[67] Behnam Neyshabur, Srinadh Bhojanapalli, David McAllester, and Nati Srebro. Exploring generalization in deep learning. In Advances in Neural Information Processing Systems, pages 5947–5956, 2017.
[68] Ian Osband, Yotam Doron, Matteo Hessel, John Aslanides, Eren Sezener, Andre Saraiva, Katrina McKinney, Tor Lattimore, Csaba Szepezvari, Satinder Singh, et al. Behaviour suite for reinforcement learning. arXiv, 2019.
[70] Charles Packer, Katelyn Gao, Jernej Kos, Philipp Krähenbühl, Vladlen Koltun, and Dawn Xiaodong Song. Assessing generalization in deep reinforcement learning. ArXiv, 2018.
[71] Diego Perez-Liebana, Katja Hofmann, Sharada Prasanna Mohanty, Noboru Sean Kuno, Andre Kramer, Sam Devlin, Raluca D. Gaina, and Daniel Ionita. The multi-agent reinforcement learning in malm (marl) competition. Technical report, 2019.
[72] Diego Perez-Liebana, Jialin Liu, Ahmed Khalifa, Raluca D Gaina, Julian Togelius, and Simon M Lucas. General video game ai: a multi-track framework for evaluating agents, games and content generation algorithms. arXiv preprint arXiv:1802.10363, 2018.
[73] Joelle Pineau. Reproducible, Reusable, and Robust Reinforcement Learning, 2018. Neural Information Processing Systems.
[74] S. Pinker. The blank slate: The modern denial of human nature. Viking, New York, 2002.
[75] David M. W. Powers. The total Turing test and the loebner prize. In New Methods in Language Processing and Computational Natural Language Learning, 1998.
[76] Lowrey K. Todorov E. V. Rajeswaran, A. and S. M. Kakade. Towards generalization and simplicity in continuous control. 2017.
[77] Fred Reed. Promise of AI not so bright, 2006.
[78] Jean-Jacques Rousseau. Emile, or On Education. 1762.
[79] & McClelland J.L. Rumelhart, D.E. Distributed memory and the representation of general and specific information. Journal of Experimental Psychology, page 159188, 1985.
[80] P. Sanghi and D. L. Dowe. A computer program capable of passing iq tests. page 570575, 2003.
[81] David Silver, Thomas Hubert, Julian Schrittwieser, Ioannis Antonoglou, Matthew Lai, Arthur Guez, Marc Lanctot, Laurent Sifre, Dharshan Kumaran, Thore Graepel, et al. Mastering chess and shogi by self-play with a general reinforcement learning algorithm. arXiv preprint arXiv:1712.01815, 2017.
[82] David Silver, Julian Schrittwieser, Karen Simonyan, Ioannis Antonoglou, Aja Huang, Arthur Guez, Thomas Hubert, Lucas Baker, Matthew Lai, Adrian Bolton, et al. Mastering the game of go without human knowledge. Nature, 550(7676):354, 2017.
[83] C. E. Spearman. ‘general intelligence’, objectively determined and measured. American Journal of Psychology, page 201293, 1904.
[84] C. E. Spearman. The Abilities of Man. Macmillan, London, 1927.
[86] Robert Sternberg. Culture and intelligence. The American psychologist, 59:325–38, 07 2004.
[87] Robert Sternberg and Douglas Detterman. What is Intelligence? Contemporary Viewpoints on Its Nature and Definition. 1986.
[88] Richard S. Sutton and Andrew G. Barto. Reinforcement Learning: An Introduction (Second Edition). MIT Press, Cambridge, MA, 2018.
[89] OpenAI team. OpenAI Five, 2019. OpenAI Accessed: 2019-09-30.
[90] OpenAI team. OpenAI Five Arena Results, 2019. OpenAI Accessed: 2019-09-30.
[91] A. M. Turing. Computing machinery and intelligence. 1950.
[92] Vladimir N. Vapnik. The Nature of Statistical Learning Theory. Springer-Verlag, Berlin, Heidelberg, 1995.
[93] Oriol Vinyals, Timo Ewalds, Sergey Bartunov, Petko Georgiev, Alexander Sasha Vezhnevets, Michelle Yeo, Alireza Makhzani, Heinrich Küttler, John Agapiou, Julian Schrittwieser, John Quan, Stephen Gaffney, Stig Petersen, Karen Simonyan, Tom Schaul, Hado van Hasselt, David Silver, Timothy P. Lillicrap, Kevin Calderone, Paul Keet, Anthony Brunasso, David Lawrence, Anders Ekermo, Jacob Repp, and Rodney Tsing. Starcraft ii: A new challenge for reinforcement learning. arXiv, 2017.
[94] Alex Wang, Yada Pruksachatkun, Nikita Nangia, Amanpreet Singh, Julian Michael, Felix Hill, Omer Levy, and Samuel R Bowman. Superglue: A stickier benchmark for general-purpose language understanding systems. 2019.
[95] Alex Wang, Amanpreet Singh, Julian Michael, Felix Hill, Omer Levy, and Samuel R Bowman. Glue: A multi-task benchmark and analysis platform for natural language understanding. 2018.
[96] Rui Wang, Joel Lehman, Jeff Clune, and Kenneth O. Stanley. Paired open-ended trailblazer (poet): Endlessly generating increasingly complex and diverse learning environments and their solutions. arXiv, 2019.
[97] David H Wolpert. What the no free lunch theorems really mean; how to improve search algorithms.
[98] D.H. Wolpert and W.G. Macready. No free lunch theorems for optimization. IEEE Transactions on Evolutionary Computation, pages 67–82, 1997.
[99] Stephen G. Wozniak. Three minutes with steve wozniak. PC World, 2007.
[100] Shih-Ying Yang and Robert J Sternberg. Taiwanese chinese people’s conceptions of intelligence. Intelligence, 25(1):21–36, 1997.
[102] Chiyuan Zhang, Samy Bengio, Moritz Hardt, Benjamin Recht, and Oriol Vinyals. Understanding deep learning requires rethinking generalization. 2017.
Footnotes
-
Turing’s imitation game was largely meant as an argumentative device in a philosophical discussion, not as a literal test of intelligence. Mistaking it for a test representative of the goal of the field of AI has been an ongoing problem. ↩
-
Note the lingering influence of the Turing Test. ↩
-
This is a distinct definition from “generalization” in mathematics, where “to generalize” means to extend the scope of application of a statement by weakening its assumptions. ↩
-
Because broad AI research is currently largely dominated by Reinforcement Learning (RL) approaches, many of our observations here are specific to RL. ↩
-
OpenAI public statement: “Five is a step towards advanced AI systems which can handle the complexity and uncertainty of the real world” ↩ -
This does not necessarily mean that humanity as a collective is incapable of solving these problems; pooling individual humans over time or augmenting human intellect via external resources leads to increased generality, albeit this increase remains incremental, and still fundamentally differs from universality. ↩
-
The boundaries between these categories may be fluid; the distinction between low-level sensorimotor priors and high-level knowledge priors is more one of degree than one of nature; likewise, the distinction between meta- ↩
-
Core Knowledge has been written into our DNA by natural evolution. Natural evolution is an extremely low-bandwidth, highly selective mechanism for transferring information from the surrounding environment to an organism’s genetic code. It can only transfer information associated with evolutionary pressures, and it can only write about aspects of the environment that are stable over sufficiently long timescales. As such, it would not be reasonable to expect humans to possess vast amounts of human-specific prior knowledge; core knowledge is evolutionarily ancient and largely shared across many species, in particular non-human primates. ↩
-
As a philosophical aside: this is why the education of children involves practicing games and ingesting knowledge of seemingly no relevance to their past or present decision-making needs, but which prepare them for future situations (a process often driven by curiosity). A 10-year-old who has only learned the simplest behavioral policy that would have maximized their extrinsic rewards (e.g. candy intake) during ages 0-10 would not be well educated, and would not generalize well in future situations. ↩
-
We consider 3 trials to be enough to account for cases in which the task may be slightly ambiguous or in which the test-taker may commit mechanical errors when inputting an answer grid. ↩