DS have a fixed law.
The evolution dynamical system with dynamical structure “DS²” can (always?) be absorbed into the state space, though at some point it stops being a useful perspective.
simple, discrete weather model update rule
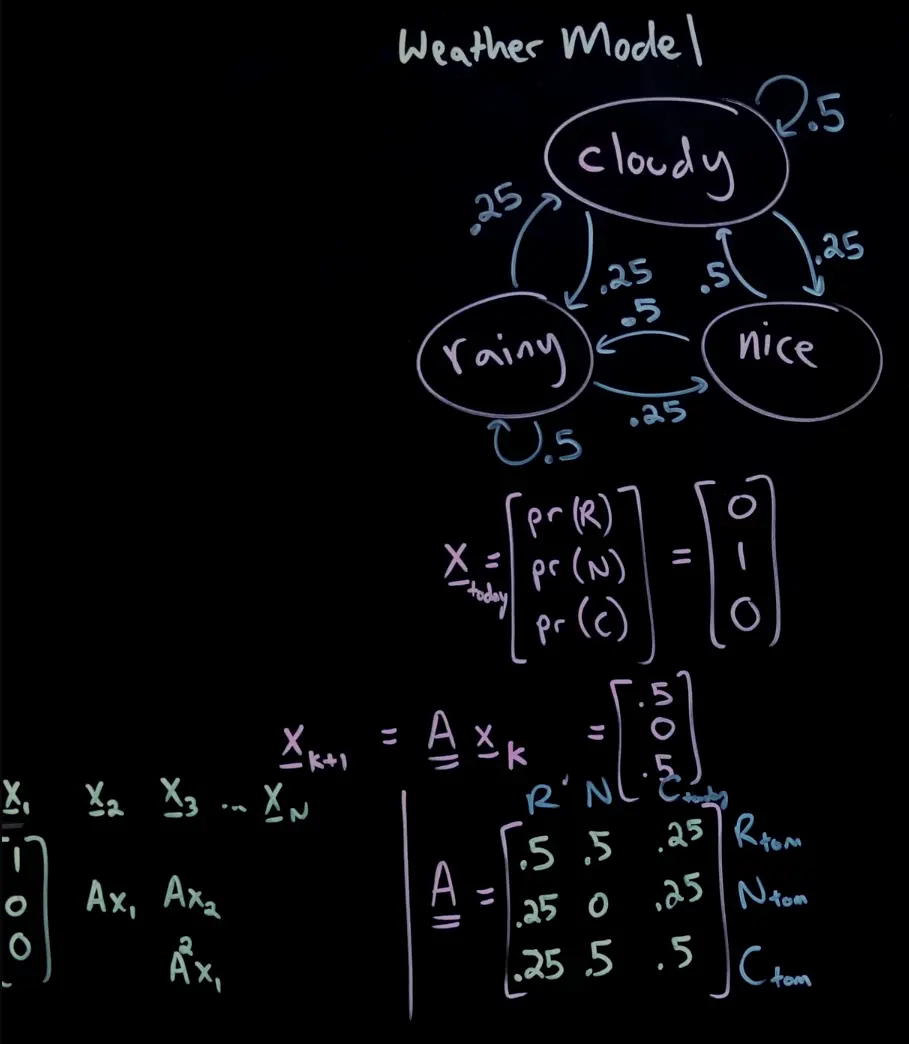
made up markov decision tree model of the weather.
weather probability of tomorrow is the probability matrix (where all columns add to one) multiplied by the one-hot vector of the weather today, essentially indexing the column with the transition probabilities from todays weather.
For this simple system, we can predict the steady-state distribution (how the distribution of rainy/cloudy/nice will evolve - no matter the starting condition), either by simply doing a couple of to approximate it or by calculating the eigenvector (possible for all probability matrices).
TODO eigenvector derivation thingy